Développement d’un système de transport mobile autonome
RÉSUMÉ
Les robots mobiles autonomes jouent un rôle important dans le transport flexible de matériel. Le robot mobile développé à l’aide de la technologie SLAM (Simultaneous Localization and Mapping) est parfaitement capable d’élaborer des cartes, d’identifier et d’optimiser des trajectoires et d’éviter des obstacles. Il est particulièrement flexible et agile pour automatiser la logistique d’usine pour la transformation numérique de l’entreposage automatique et du transport de matériel. Nous avons étudié les applications des technologies de navigation avec les robots mobiles et nous avons développé des solutions d’un point de vue stratégique pour automatiser les processus de water spider.
ÉNONCÉ DU PROBLÈME
L’approche classique du transport de matériel consiste à utiliser le water spider pour transporter le matériel du magasin ou de l’entrepôt de matériel vers les zones de production. La Figure 1 illustre un processus général de water spider avec un opérateur qui pousse/tire une remorque chargée de caisses de matériel dans une usine TE. En principe, le matériel n’est pas transporté directement vers les lignes de production, mais d’abord vers une zone tampon, comme illustré dans la Figure 2. Les lignes de production récupèrent le matériel dans la zone tampon. Après vérification, si la quantité de matériel n’est pas suffisante pour assurer la production des deux prochaines heures ou plus, la ligne de production place une étiquette dans la zone tampon pour signaler une demande de matériel. Les magasiniers vérifient la disponibilité du matériel dans la zone tampon lorsqu’ils voient ou reçoivent la demande de matériel et se procurent le matériel du magasin ou de l’entrepôt à l’aide d’un water spider alloué au transport de matériel. De toute évidence, l’approche classique est fastidieuse et peu efficace. Sans compter que les types de matériel à gérer sont nombreux, ce qui complique leur recherche/localisation et nuit encore à l’efficacité du transport de matériel. Pire encore, le water spider manuel pourrait ne pas satisfaire la demande de transport de matériel en temps voulu, ce qui pourrait affecter la productivité des lignes de production si celles-ci devaient attendre l’arrivée de matériel.
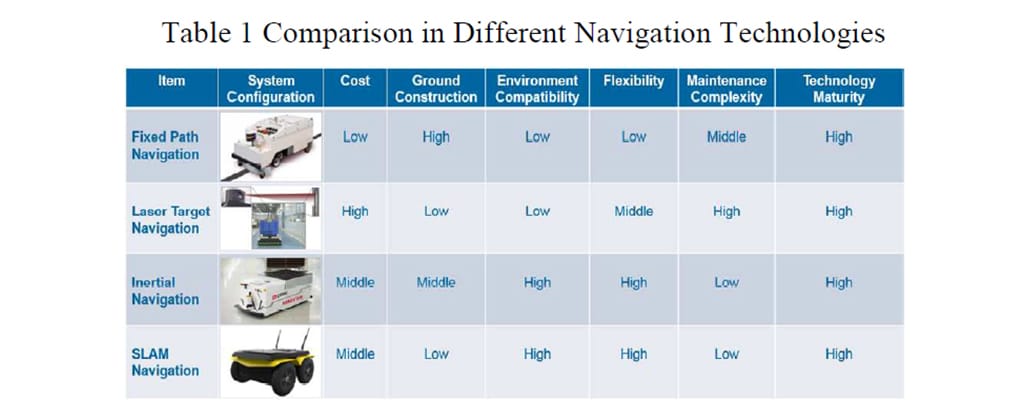
L’automatisation et la transformation numérique contribueraient largement à améliorer l’efficacité du transport de matériel et à réduire le temps de réponse. Les robots mobiles autonomes capables de se déplacer en toute autonomie, qui peuvent être améliorés grâce à des connexions numériques aux lignes de production et aux systèmes MES, sont d’excellentes alternatives aux water spiders manuels. Il existe généralement quatre grands types de technologies de navigation : à trajectoire fixe, sur cible laser, inertielle et SLAM, comme illustré dans le Tableau 1. La navigation à trajectoire fixe, qui nécessite de coller des bandes magnétiques au sol pour guider le robot mobile, présente la mobilité et la flexibilité les plus faibles. La navigation sur cible laser, qui s’appuie sur une cible laser pour réfléchir le faisceau laser vers le robot afin d’assurer une localisation précise du robot, est peu compatible avec l’environnement. De plus, si la cible laser est déplacée ou si elle est bloquée par d’autres obstacles, la navigation précise du robot sera très difficile à obtenir. La navigation inertielle, qui nécessite de poser des clous magnétiques ou de coller des codes QR au sol, est plus compatible avec le changement de configuration de l’environnement, mais n’est accessible que dans les zones dotées de clous magnétiques ou de codes QR. La navigation SLAM, qui est parfaitement capable de mettre à jour la carte en temps réel pour rechercher une trajectoire, éviter des obstacles et naviguer de façon autonome, est la plus compatible avec l’environnement et présente la plus grande flexibilité de déplacement autonome. Cette technologie de navigation est également optimale pour le transport flexible de matériel dans les zones de production impliquant des interactions fréquentes avec des opérateurs humains ou d’autres appareils mobiles. Le Tableau 1 présente un comparatif des différentes technologies de navigation. Nous cherchons à développer des systèmes de transport mobile autonomes basés sur la navigation SLAM pour TE.
MÉTHODES ET RÉSULTATS
Technologie de navigation de pointe sur les robots mobiles
La navigation, qui est basée sur la localisation et la perception de l’environnement, est un sujet de recherche de haut niveau en robotique. En général, la planification de trajectoire globale est parfaitement indiquée pour générer une trajectoire optimisée, mais pas pour réagir à un obstacle inconnu. En revanche, une méthode de navigation locale/réactive est efficace dans un environnement dynamique et initialement inconnu, mais pas dans un environnement complexe[1]. Cette recherche s’intéresse aux algorithmes de planification de trajectoires globale et locale, et propose la méthode de navigation hybride.
La planification de trajectoire globale a fait l’objet d’études approfondies dans le domaine universitaire et a été appliquée dans de nombreux cas pratiques. Les algorithmes de graphe sont fréquemment utilisés, notamment les algorithmes de Dijkstra[2], A*[3] et de Voronoï[4], qui sont généralement appliqués dans une zone délimitée. Les méthodes de champ potentiel artificiel (APF)[5] utilisent davantage d’informations sur l’environnement et conviennent à la navigation en temps réel.
Cependant, les trajectoires générées par les méthodes APF ne sont généralement pas optimales. Le processus décisionnel de Markov est une méthode probabiliste dans laquelle la décision ne concerne que le dernier état et n’a aucun rapport avec d’autres états précédents. D’autres algorithmes de planification de trajectoire globale [6] sont également étudiés pour déterminer la trajectoire à suivre pour atteindre l’objectif.
La planification de trajectoire locale gère l’évitement des obstacles dans un environnement local. La commande prédictive (MPC) [7] est de plus en plus appliquée à la navigation des robots mobiles autonomes en raison de sa robustesse et de sa convergence pour la planification de trajectoires. L’idée clé de la MPC est de prédire l’avenir avec un modèle personnalisé pour planifier la trajectoire, puis d’appliquer la commande initiale correspondant à la trajectoire choisie pour le robot mobile. L’approche par fenêtre dynamique (DWA)[8], qui évalue chaque trajectoire et sélectionne celle qui obtient le score le plus élevé, n’est pas seulement un algorithme indépendant, mais aussi un composant de la MPC. Cependant, la DWA suppose que tous les obstacles sont statiques, ce qui ne convient pas à l’évitement d’obstacles dynamiques à une vitesse relativement élevée. Les algorithmes tels que ceux qui utilisent des obstacles de vitesse et des cônes de collision supposent que les obstacles se déplacent selon une vitesse et une accélération déterministes.
La plupart des usines TE présentent évidemment des configurations relativement statiques sur les équipements et les lignes de production avec des environnements connus, ainsi que des déplacements imprévisibles des opérateurs d’appareils, qui sont considérés comme des obstacles dynamiques, et ni la planification de trajectoire globale ni la planification de trajectoire locale ne seraient parfaitement adaptées à la navigation des robots mobiles. Il est nécessaire de développer une méthode hybride combinant les planifications de trajectoires locale et globale pour la navigation.
Base de la navigation autonome - Élaboration de cartes
Lorsque le robot mobile autonome est déployé dans un environnement inconnu pour identifier de manière autonome le moyen d’atteindre l’objectif, il doit traverser l’environnement jusqu’à l’objectif. Lorsque de nouveaux objectifs sont ajoutés et définis, il n’est pas judicieux de donner au robot l’ordre de traverser l’environnement à chaque fois. Cette approche génère en effet des coûts élevés en termes de temps de calcul et d’espace de stockage.
De plus, l’objectif est généralement une position relative par rapport au robot mobile lors de la navigation dans l’environnement. Il est donc important d’utiliser un descripteur d’environnement, par exemple une carte, pour enregistrer et décrire les informations sur l’environnement afin que le robot sache où il se trouve et où il doit aller précisément. Il existe différentes variantes
de la carte, telle que la carte d’entités, la carte topologique, la carte en grille et la méthode basée sur l’apparence. La carte de caractéristiques, qui décrit l’environnement avec des points, des lignes ou des plans clés, contribue à une visualisation vivante.
La carte topologique décrit les nœuds et la connectivité de l’environnement. La méthode basée sur l’apparence calcule directement la pose des robots. La carte en grille prend en compte à la fois la simplicité et la visualisation de la représentation de l’environnement. Elle constitue un descripteur d’environnement optimal pour la navigation des robots mobiles. Cette section étudie l’approche de cartographie d’un environnement inconnu pour obtenir une carte en grille.
Sans connaissance préalable de l’environnement, la technologie SLAM, qui crée la carte de l’environnement inconnu tout en suivant la pose du robot, joue un rôle essentiel dans l’élaboration de cartes. Notre méthode utilise le filtre à particules Rao-Blackwellized pour le SLAM afin de garantir la robustesse et la qualité de la cartographie. Le filtre SIR (Sampling Importance Resampling) est l’un des algorithmes de filtrage des particules les plus courants. Le processus de cartographie avec le filtre SIR Rao-Blackwellized se compose des étapes suivantes :
- Échantillonnage : la pose actuelle du robot xt(i) est calculée d’après la dernière pose du robot xt-1(i) par la distribution de proposition π(xt|z1:t,u0:t)
- Pondération de l’importance : chaque particule est formulée selon sa propre pondération, comme décrit par Eq.(1)

- Rééchantillonnage : pour éviter les particules infinies et assurer la convergence de l’algorithme, la quantité de particules doit être réduite, et les particules présentant une pondération d’importance faible sont remplacées par celles présentant une pondération d’importance élevée pour le processus de rééchantillonnage.
- Estimation de la carte : la carte actuelle mt(i) est estimée avec les observations historiques z1:t et les poses x1:t.
L’idée principale du filtre à particules Rao-Blackwellized est donc de calculer une probabilité postérieure sur les cartes et les trajectoires, comme formulé par Eq.(2)
P(x1:t, m|z1:t, u0:t) = P(x1:t, m|x1:t, z1:t)P(x1:t|z1:t,u0:t) (2)
Où u0:t est la séquentielle des mesures d’odométrie incluant la pose initiale, z1:t est la séquentielle des observations, x1:t décrit les trajectoires potentielles et m représente la carte.
Un environnement de simulation est construit pour vérifier l’algorithme d’élaboration de la carte, comme illustré dans la Figure 3. Le robot mobile se déplace dans l’espace libre, l’environnement est délimité par des murs d’enceinte et les cases à l’intérieur illustrent différentes stations, qui pourraient être considérées comme des obstacles. La zone bleue illustrée dans la Figure 3 est la plage de balayage du robot mobile. En indiquant au robot mobile de se déplacer dans cet environnement de simulation, la carte en grille est basée sur les technologies SLAM, comme illustré dans la Figure 4.
Planification de trajectoire dans un environnement connu
Une fois la carte disponible pour l’environnement, la position initiale du robot mobile est souvent définie comme un point de départ, et l’objectif est défini comme le point d’arrivée sur la carte pour élaborer la trajectoire à indiquer au robot. L’identification d’une trajectoire accessible du point de départ au point d’arrivée et l’envoi d’une commande indiquant au robot de suivre cette trajectoire en tenant compte de sa dynamique et de son environnement constituent la planification de trajectoires globale et locale.
Dans le processus de planification de trajectoire globale, les algorithmes de Dijkstra et A* sont deux moyens principaux de rechercher la trajectoire la plus courte, qui s’appuient respectivement sur une recherche en largeur et une recherche en profondeur. Ils sont décrits brièvement dans le Tableau 2.
Brève description des algorithmes de Dijkstra et A*
Tableau 2
| Algorithme de Dijkstra | Algorithme A* |
|---|---|
(1) Définissez la valeur de distance initiale pour chaque nœud : attribuez 0 au nœud de départ et la valeur d’infini aux autres nœuds. (2) Définissez le nœud de départ comme nœud actuel et marquez tous les autres nœuds comme non visités. (3) Pour le nœud actuel, recherchez le nœud le plus proche dont la distance par rapport au nœud visité est la plus courte. (4) Marquez le nœud le plus proche comme visité afin qu’il ne soit plus jamais vérifié. (5) Si le nœud d’objectif a été marqué comme visité, la recherche est terminée. Sinon, répétez l’étape (3). |
(1) Définissez le nœud initial comme nœud actuel. Calculez le poids de ses voisins selon la formule f(n) = g(n) + h(n), où g(n) est le coût de la trajectoire à partir du nœud de départ et h(n) est le coût estimé de n à l’objectif. (2) Définissez le nœud présentant le poids le plus faible comme nœud actuel et reprenez l’étape (1). (3) Répétez les étapes (1) et (2) jusqu’à ce que l’objectif soit identifié comme le nœud actuel. |
Quelle que soit la méthode choisie, elle doit théoriquement générer une trajectoire accessible. Mais une trajectoire accessible n’est pas nécessairement exécutable. La planification de trajectoire locale permet de rapprocher trajectoire accessible et trajectoire exécutable. Cette recherche utilise l’algorithme de fenêtre dynamique, qui comprend les étapes suivantes :
- Échantillonnage discret dans l’espace de contrôle du robot
- Prédiction du résultat de chaque échantillon potentiel avec une estimation prospective
- Évaluation des trajectoires candidates à partir du point de distance et de la coïncidence de la trajectoire globale
- Sélection de la trajectoire présentant le score le plus élevé
- Répétition
La planification de trajectoire locale s’avère plus efficace pour l’évitement des obstacles lors de la génération de la trajectoire exécutable. Lorsque le robot mobile suit la trajectoire globale, les observations locales permettent d’élaborer une carte locale sur laquelle les nouveaux obstacles ou les obstacles imprévus seront identifiés. La planification de trajectoire locale génère ensuite une trajectoire locale qui évitera toute interférence avec ces obstacles. Dans ce cas, le robot peut éviter les obstacles statiques et dynamiques à basse vitesse.
Simulation de navigation autonome
Un environnement de simulation est mis en place comme illustré à la Figure 3 et la carte de l’environnement a été élaborée dans la section II.B d’après l’algorithme SLAM. L’algorithme de planification de trajectoire est testé sur la carte, avec l’application et la vérification de l’algorithme de Dijkstra dans cette partie. Tout d’abord, la pose actuelle du robot est configurée dans la carte et définie comme point de départ.
Le robot doit ensuite suivre la trajectoire planifiée via la planification de trajectoire globale une fois l’objectif défini. Comme le montre la Figure 5, la trajectoire bleue est la trajectoire globale du départ jusqu’à l’objectif tandis que la jaune est la trajectoire locale qui suit la trajectoire globale. Plusieurs séries de tests de vérification ont permis de conclure que l’approche Dijkstra pourrait générer une trajectoire globale accessible
et que la trajectoire locale générée par DWA pourrait être la trajectoire exécutable alignée sur la trajectoire globale.
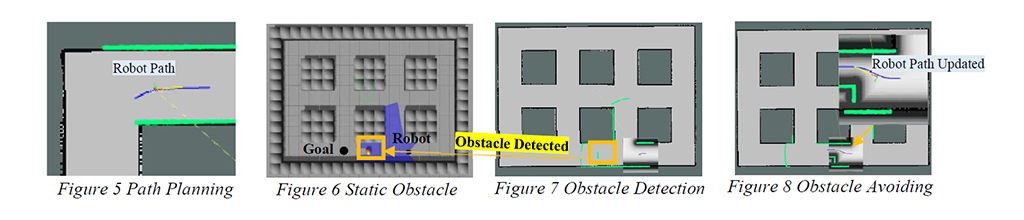
La capacité à éviter les obstacles est également évaluée ici. Comme le montre la Figure 6, un obstacle imprévu qui ne figure pas sur la carte se trouve juste en face du robot. L’obstacle, qui se trouve dans la plage de balayage du scanner laser, est détecté par le robot, comme illustré dans la Figure 7. Pour vérifier si le robot serait capable d’éviter le nouvel obstacle et
de le passer, un objectif est configuré directement après l’obstacle détecté afin de déterminer comment le robot réagit à l’obstacle imprévu pour atteindre l’objectif. La planification de trajectoire locale permet de générer une carte locale comme illustré à la Figure 8, avec l’obstacle mis à jour dans la carte locale et la courbe jaune représentant la trajectoire locale générée pour éviter l’obstacle. On peut voir
que le robot ne se déplace pas en ligne droite, ce qui provoquerait une interférence avec l’obstacle, mais qu’il suit une trajectoire adaptée en contournant l’obstacle sans entrer en collision avec celui-ci. Cela confirme la capacité du robot à éviter l’obstacle statique. D’autres tests ont également été effectués avec des obstacles dynamiques capables de se déplacer sur la carte à une vitesse relativement faible et de venir à la rencontre du robot. Les résultats de ces tests montrent aussi que le robot est capable de mettre à jour sa carte locale avec la trajectoire locale générée pour éviter les collisions avec les obstacles dynamiques. Les résultats de la simulation valident l’approche hybride combinant les planifications de trajectoires globale et locale pour planifier la trajectoire du robot et éviter les obstacles.
DISCUSSION ET POINTS CLÉS
Véhicule de transport mobile autonome
Les technologies clés développées et vérifiées dans la section II sur l’élaboration de cartes et la planification de trajectoires avec SLAM améliorent la capacité de navigation autonome du robot mobile. Par rapport au Tableau 1, la technologie de navigation basée sur SLAM ne nécessite pas de placer une bande magnétique, des clous magnétiques ou un code QR au sol ou de coller la cible laser sur les murs ou des structures fixes. Il est tout à fait possible d’élaborer automatiquement la carte d’un environnement et d’éviter les collisions avec des obstacles imprévus qui ne figurent pas sur la carte. Le robot mobile basé sur SLAM est l’alternative optimale à utiliser pour développer un système de transport mobile autonome.
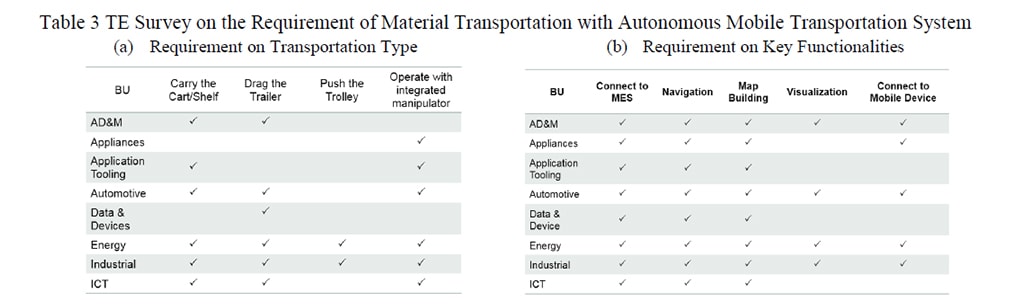
Une enquête a été menée auprès des unités d’entreprise de TE sur les exigences relatives au transport mobile autonome de matériel. Parmi les priorités relatives au type de transport de matériel figure la possibilité que le robot mobile transporte le chariot/rack, tire la remorque et intègre un manipulateur pour le matériel, comme indiqué dans le Tableau 3 (a). Les fonctionnalités clés présentant les niveaux de priorité élevés à mettre en œuvre sur le robot mobile autonome sont la connexion au MES, la navigation autonome et l’élaboration automatique de cartes, comme le montre le Tableau 3 (b). Parmi toutes les attentes, les unités d’entreprise ont attribué la priorité la plus élevée à l’automatisation du processus de water spider avec le robot mobile. Comme le montre la Figure 9, le water spider est le processus le plus
critique pour le transport de matériel de l’entrepôt/du magasin de matériel vers les zones de production. Il est proposé ici de développer un véhicule de transport mobile autonome (AMT) latent basé sur la technologie de navigation SLAM pour transporter le rack en vue du transport flexible de matériel comme illustré à la Figure 10. Le véhicule autonome est capable de supporter une charge utile de plus de 300 kg et de fonctionner à une vitesse de 0,8-1 m/s dans l’usine. Cette solution offre une alternative très efficace au processus de water spider manuel.
Système de transport mobile autonome
Avec la disponibilité des véhicules de transport mobiles autonomes, l’objectif est d’intégrer les véhicules au système de transport autonome (AMTS) pour développer des solutions clés en main pour les usines TE. La Figure 9 illustre le processus global de transport de matériel. La présence d’un opérateur est généralement requise pour déballer et trier le matériel dans
l’entrepôt, puis pour transférer le matériel trié dans les caisses à stocker dans le magasin de matériel. Des water spiders manuels sont utilisés pour transporter le matériel du magasin vers la zone tampon. Les lignes de production récupèrent le matériel dans la zone tampon.
Sachant que pratiquement aucune usine TE n’a encore automatisé le processus
de l’entrepôt à la ligne de production, il est proposé de commencer par l’automatisation du processus de water spider avec le véhicule de transport mobile autonome, comme illustré à la Figure 10. Le véhicule AMT fournit bien sûr des solutions d’automatisation du transport de matériel de bout en bout, du magasin de matériel à la ligne de production. Il permet un transport plus rapide et plus efficace du matériel, ce qui réduit considérablement le coût de main-d’œuvre et libère les zones tampons requises des water spiders manuels.
Pour tirer davantage profit de la capacité de connexion numérique d’un véhicule AMT aux réseaux, il est également proposé ici de numériser le processus de demande de matériel. Puisque les opérateurs/techniciens/ingénieurs utilisent couramment des smartphones, il est proposé de développer une application à installer sur les terminaux mobiles pour la demande de matériel et la communication, comme illustré à la Figure 11. Pour garantir la sécurité des communications, des applications et des véhicules AMT, mais aussi du serveur qui sera connecté aux réseaux locaux de TE, seuls les employés autorisés pourront se connecter à l’application ou accéder au système de demande de matériel, de communication et de surveillance.

L’architecture suivante est donc proposée pour le système de transport mobile autonome, comme illustré à la Figure 12. Tous les véhicules AMT sont gérés par le système de coordination central AMTS pour l’attribution des tâches, la planification des trajectoires et le contrôle du trafic.
Les applications sont également connectées au système de coordination central AMTS, et lorsque les lignes de production demandent du matériel via l’application mobile, l’opérateur du magasin de matériel reçoit la demande et prépare le matériel, puis le système de coordination central AMTS désigne un véhicule AMT chargé du
transport du matériel. Une fois que le véhicule AMT a livré le matériel aux lignes de production, les opérateurs peuvent le libérer d’un simple clic et le système de coordination central AMTS pourra lui attribuer une nouvelle tâche.
REMERCIEMENTS
Les auteurs tiennent à remercier Josef Sinder, de la BU Automotive, et Tim Darr, d’AMT Harrisburg, pour leurs suggestions et leurs indications. Ils remercient également l’équipe Automotive de Suzhou de leur avoir présenté les exigences relatives à l’automatisation du transport de matériel pour l’usine automobile de Suzhou.
RÉFÉRENCES
[1] Wang, Lim Chee, Lim Ser Yong et Marcelo H. Ang. « Hybrid of global path planning and local navigation implemented on a mobile robot in indoor environment. » Intelligent Control, 2002. Compte rendu de la conférence internationale 2002 de l’IEEE. IEEE, 2002.
[2] Skiena, S. « Dijkstra’s algorithm. » Implementing Discrete Mathematics: Combinatorics and Graph Theory with Mathematica, Reading, MA: Addison-Wesley (1990): 225-227.
[3] Duchoň, František, et al. « Path planning with modified A star algorithm for a mobile robot. » Procedia Engineering 96 (2014): 59-69.
[4] Garrido, Santiago, et al. « Path planning for mobile robot navigation using voronoi diagram and fast marching. » Intelligent Robots and Systems, Conférence internationale 2006 de l’IEEE/RSJ. IEEE, 2006.
[5] Warren, Charles W. « Global path planning using artificial potential fields. » Robotics and Automation, 1989. Proceedings., Conférence internationale 1989 de l’IEEE. IEEE, 1989.
[6] Hoy, Michael, Alexey S. Matveev et Andrey V. Savkin. « Algorithms for collision-free navigation of mobile robots in complex cluttered environments: a survey. » Robotica 33.03 (2015): 463-497.
[7] Morari, Manfred et al. « Model predictive control ». Publication préliminaire (2002).
[8] Fox, Dieter, Wolfram Burgard et Sebastian Thrun. « The dynamic window approach to collision avoidance. » IEEE Robotics & Automation Magazine 4.1 (1997): 23-33.
Développement d’un système de transport mobile autonome
RÉSUMÉ
Les robots mobiles autonomes jouent un rôle important dans le transport flexible de matériel. Le robot mobile développé à l’aide de la technologie SLAM (Simultaneous Localization and Mapping) est parfaitement capable d’élaborer des cartes, d’identifier et d’optimiser des trajectoires et d’éviter des obstacles. Il est particulièrement flexible et agile pour automatiser la logistique d’usine pour la transformation numérique de l’entreposage automatique et du transport de matériel. Nous avons étudié les applications des technologies de navigation avec les robots mobiles et nous avons développé des solutions d’un point de vue stratégique pour automatiser les processus de water spider.
ÉNONCÉ DU PROBLÈME
L’approche classique du transport de matériel consiste à utiliser le water spider pour transporter le matériel du magasin ou de l’entrepôt de matériel vers les zones de production. La Figure 1 illustre un processus général de water spider avec un opérateur qui pousse/tire une remorque chargée de caisses de matériel dans une usine TE. En principe, le matériel n’est pas transporté directement vers les lignes de production, mais d’abord vers une zone tampon, comme illustré dans la Figure 2. Les lignes de production récupèrent le matériel dans la zone tampon. Après vérification, si la quantité de matériel n’est pas suffisante pour assurer la production des deux prochaines heures ou plus, la ligne de production place une étiquette dans la zone tampon pour signaler une demande de matériel. Les magasiniers vérifient la disponibilité du matériel dans la zone tampon lorsqu’ils voient ou reçoivent la demande de matériel et se procurent le matériel du magasin ou de l’entrepôt à l’aide d’un water spider alloué au transport de matériel. De toute évidence, l’approche classique est fastidieuse et peu efficace. Sans compter que les types de matériel à gérer sont nombreux, ce qui complique leur recherche/localisation et nuit encore à l’efficacité du transport de matériel. Pire encore, le water spider manuel pourrait ne pas satisfaire la demande de transport de matériel en temps voulu, ce qui pourrait affecter la productivité des lignes de production si celles-ci devaient attendre l’arrivée de matériel.
L’automatisation et la transformation numérique contribueraient largement à améliorer l’efficacité du transport de matériel et à réduire le temps de réponse. Les robots mobiles autonomes capables de se déplacer en toute autonomie, qui peuvent être améliorés grâce à des connexions numériques aux lignes de production et aux systèmes MES, sont d’excellentes alternatives aux water spiders manuels. Il existe généralement quatre grands types de technologies de navigation : à trajectoire fixe, sur cible laser, inertielle et SLAM, comme illustré dans le Tableau 1. La navigation à trajectoire fixe, qui nécessite de coller des bandes magnétiques au sol pour guider le robot mobile, présente la mobilité et la flexibilité les plus faibles. La navigation sur cible laser, qui s’appuie sur une cible laser pour réfléchir le faisceau laser vers le robot afin d’assurer une localisation précise du robot, est peu compatible avec l’environnement. De plus, si la cible laser est déplacée ou si elle est bloquée par d’autres obstacles, la navigation précise du robot sera très difficile à obtenir. La navigation inertielle, qui nécessite de poser des clous magnétiques ou de coller des codes QR au sol, est plus compatible avec le changement de configuration de l’environnement, mais n’est accessible que dans les zones dotées de clous magnétiques ou de codes QR. La navigation SLAM, qui est parfaitement capable de mettre à jour la carte en temps réel pour rechercher une trajectoire, éviter des obstacles et naviguer de façon autonome, est la plus compatible avec l’environnement et présente la plus grande flexibilité de déplacement autonome. Cette technologie de navigation est également optimale pour le transport flexible de matériel dans les zones de production impliquant des interactions fréquentes avec des opérateurs humains ou d’autres appareils mobiles. Le Tableau 1 présente un comparatif des différentes technologies de navigation. Nous cherchons à développer des systèmes de transport mobile autonomes basés sur la navigation SLAM pour TE.
MÉTHODES ET RÉSULTATS
Technologie de navigation de pointe sur les robots mobiles
La navigation, qui est basée sur la localisation et la perception de l’environnement, est un sujet de recherche de haut niveau en robotique. En général, la planification de trajectoire globale est parfaitement indiquée pour générer une trajectoire optimisée, mais pas pour réagir à un obstacle inconnu. En revanche, une méthode de navigation locale/réactive est efficace dans un environnement dynamique et initialement inconnu, mais pas dans un environnement complexe[1]. Cette recherche s’intéresse aux algorithmes de planification de trajectoires globale et locale, et propose la méthode de navigation hybride.
La planification de trajectoire globale a fait l’objet d’études approfondies dans le domaine universitaire et a été appliquée dans de nombreux cas pratiques. Les algorithmes de graphe sont fréquemment utilisés, notamment les algorithmes de Dijkstra[2], A*[3] et de Voronoï[4], qui sont généralement appliqués dans une zone délimitée. Les méthodes de champ potentiel artificiel (APF)[5] utilisent davantage d’informations sur l’environnement et conviennent à la navigation en temps réel.
Cependant, les trajectoires générées par les méthodes APF ne sont généralement pas optimales. Le processus décisionnel de Markov est une méthode probabiliste dans laquelle la décision ne concerne que le dernier état et n’a aucun rapport avec d’autres états précédents. D’autres algorithmes de planification de trajectoire globale [6] sont également étudiés pour déterminer la trajectoire à suivre pour atteindre l’objectif.
La planification de trajectoire locale gère l’évitement des obstacles dans un environnement local. La commande prédictive (MPC) [7] est de plus en plus appliquée à la navigation des robots mobiles autonomes en raison de sa robustesse et de sa convergence pour la planification de trajectoires. L’idée clé de la MPC est de prédire l’avenir avec un modèle personnalisé pour planifier la trajectoire, puis d’appliquer la commande initiale correspondant à la trajectoire choisie pour le robot mobile. L’approche par fenêtre dynamique (DWA)[8], qui évalue chaque trajectoire et sélectionne celle qui obtient le score le plus élevé, n’est pas seulement un algorithme indépendant, mais aussi un composant de la MPC. Cependant, la DWA suppose que tous les obstacles sont statiques, ce qui ne convient pas à l’évitement d’obstacles dynamiques à une vitesse relativement élevée. Les algorithmes tels que ceux qui utilisent des obstacles de vitesse et des cônes de collision supposent que les obstacles se déplacent selon une vitesse et une accélération déterministes.
La plupart des usines TE présentent évidemment des configurations relativement statiques sur les équipements et les lignes de production avec des environnements connus, ainsi que des déplacements imprévisibles des opérateurs d’appareils, qui sont considérés comme des obstacles dynamiques, et ni la planification de trajectoire globale ni la planification de trajectoire locale ne seraient parfaitement adaptées à la navigation des robots mobiles. Il est nécessaire de développer une méthode hybride combinant les planifications de trajectoires locale et globale pour la navigation.
Base de la navigation autonome - Élaboration de cartes
Lorsque le robot mobile autonome est déployé dans un environnement inconnu pour identifier de manière autonome le moyen d’atteindre l’objectif, il doit traverser l’environnement jusqu’à l’objectif. Lorsque de nouveaux objectifs sont ajoutés et définis, il n’est pas judicieux de donner au robot l’ordre de traverser l’environnement à chaque fois. Cette approche génère en effet des coûts élevés en termes de temps de calcul et d’espace de stockage.
De plus, l’objectif est généralement une position relative par rapport au robot mobile lors de la navigation dans l’environnement. Il est donc important d’utiliser un descripteur d’environnement, par exemple une carte, pour enregistrer et décrire les informations sur l’environnement afin que le robot sache où il se trouve et où il doit aller précisément. Il existe différentes variantes
de la carte, telle que la carte d’entités, la carte topologique, la carte en grille et la méthode basée sur l’apparence. La carte de caractéristiques, qui décrit l’environnement avec des points, des lignes ou des plans clés, contribue à une visualisation vivante.
La carte topologique décrit les nœuds et la connectivité de l’environnement. La méthode basée sur l’apparence calcule directement la pose des robots. La carte en grille prend en compte à la fois la simplicité et la visualisation de la représentation de l’environnement. Elle constitue un descripteur d’environnement optimal pour la navigation des robots mobiles. Cette section étudie l’approche de cartographie d’un environnement inconnu pour obtenir une carte en grille.
Sans connaissance préalable de l’environnement, la technologie SLAM, qui crée la carte de l’environnement inconnu tout en suivant la pose du robot, joue un rôle essentiel dans l’élaboration de cartes. Notre méthode utilise le filtre à particules Rao-Blackwellized pour le SLAM afin de garantir la robustesse et la qualité de la cartographie. Le filtre SIR (Sampling Importance Resampling) est l’un des algorithmes de filtrage des particules les plus courants. Le processus de cartographie avec le filtre SIR Rao-Blackwellized se compose des étapes suivantes :
- Échantillonnage : la pose actuelle du robot xt(i) est calculée d’après la dernière pose du robot xt-1(i) par la distribution de proposition π(xt|z1:t,u0:t)
- Pondération de l’importance : chaque particule est formulée selon sa propre pondération, comme décrit par Eq.(1)
- Rééchantillonnage : pour éviter les particules infinies et assurer la convergence de l’algorithme, la quantité de particules doit être réduite, et les particules présentant une pondération d’importance faible sont remplacées par celles présentant une pondération d’importance élevée pour le processus de rééchantillonnage.
- Estimation de la carte : la carte actuelle mt(i) est estimée avec les observations historiques z1:t et les poses x1:t.
L’idée principale du filtre à particules Rao-Blackwellized est donc de calculer une probabilité postérieure sur les cartes et les trajectoires, comme formulé par Eq.(2)
P(x1:t, m|z1:t, u0:t) = P(x1:t, m|x1:t, z1:t)P(x1:t|z1:t,u0:t) (2)
Où u0:t est la séquentielle des mesures d’odométrie incluant la pose initiale, z1:t est la séquentielle des observations, x1:t décrit les trajectoires potentielles et m représente la carte.
Un environnement de simulation est construit pour vérifier l’algorithme d’élaboration de la carte, comme illustré dans la Figure 3. Le robot mobile se déplace dans l’espace libre, l’environnement est délimité par des murs d’enceinte et les cases à l’intérieur illustrent différentes stations, qui pourraient être considérées comme des obstacles. La zone bleue illustrée dans la Figure 3 est la plage de balayage du robot mobile. En indiquant au robot mobile de se déplacer dans cet environnement de simulation, la carte en grille est basée sur les technologies SLAM, comme illustré dans la Figure 4.
Planification de trajectoire dans un environnement connu
Une fois la carte disponible pour l’environnement, la position initiale du robot mobile est souvent définie comme un point de départ, et l’objectif est défini comme le point d’arrivée sur la carte pour élaborer la trajectoire à indiquer au robot. L’identification d’une trajectoire accessible du point de départ au point d’arrivée et l’envoi d’une commande indiquant au robot de suivre cette trajectoire en tenant compte de sa dynamique et de son environnement constituent la planification de trajectoires globale et locale.
Dans le processus de planification de trajectoire globale, les algorithmes de Dijkstra et A* sont deux moyens principaux de rechercher la trajectoire la plus courte, qui s’appuient respectivement sur une recherche en largeur et une recherche en profondeur. Ils sont décrits brièvement dans le Tableau 2.
Brève description des algorithmes de Dijkstra et A*
Tableau 2
| Algorithme de Dijkstra | Algorithme A* |
|---|---|
(1) Définissez la valeur de distance initiale pour chaque nœud : attribuez 0 au nœud de départ et la valeur d’infini aux autres nœuds. (2) Définissez le nœud de départ comme nœud actuel et marquez tous les autres nœuds comme non visités. (3) Pour le nœud actuel, recherchez le nœud le plus proche dont la distance par rapport au nœud visité est la plus courte. (4) Marquez le nœud le plus proche comme visité afin qu’il ne soit plus jamais vérifié. (5) Si le nœud d’objectif a été marqué comme visité, la recherche est terminée. Sinon, répétez l’étape (3). |
(1) Définissez le nœud initial comme nœud actuel. Calculez le poids de ses voisins selon la formule f(n) = g(n) + h(n), où g(n) est le coût de la trajectoire à partir du nœud de départ et h(n) est le coût estimé de n à l’objectif. (2) Définissez le nœud présentant le poids le plus faible comme nœud actuel et reprenez l’étape (1). (3) Répétez les étapes (1) et (2) jusqu’à ce que l’objectif soit identifié comme le nœud actuel. |
Quelle que soit la méthode choisie, elle doit théoriquement générer une trajectoire accessible. Mais une trajectoire accessible n’est pas nécessairement exécutable. La planification de trajectoire locale permet de rapprocher trajectoire accessible et trajectoire exécutable. Cette recherche utilise l’algorithme de fenêtre dynamique, qui comprend les étapes suivantes :
- Échantillonnage discret dans l’espace de contrôle du robot
- Prédiction du résultat de chaque échantillon potentiel avec une estimation prospective
- Évaluation des trajectoires candidates à partir du point de distance et de la coïncidence de la trajectoire globale
- Sélection de la trajectoire présentant le score le plus élevé
- Répétition
La planification de trajectoire locale s’avère plus efficace pour l’évitement des obstacles lors de la génération de la trajectoire exécutable. Lorsque le robot mobile suit la trajectoire globale, les observations locales permettent d’élaborer une carte locale sur laquelle les nouveaux obstacles ou les obstacles imprévus seront identifiés. La planification de trajectoire locale génère ensuite une trajectoire locale qui évitera toute interférence avec ces obstacles. Dans ce cas, le robot peut éviter les obstacles statiques et dynamiques à basse vitesse.
Simulation de navigation autonome
Un environnement de simulation est mis en place comme illustré à la Figure 3 et la carte de l’environnement a été élaborée dans la section II.B d’après l’algorithme SLAM. L’algorithme de planification de trajectoire est testé sur la carte, avec l’application et la vérification de l’algorithme de Dijkstra dans cette partie. Tout d’abord, la pose actuelle du robot est configurée dans la carte et définie comme point de départ.
Le robot doit ensuite suivre la trajectoire planifiée via la planification de trajectoire globale une fois l’objectif défini. Comme le montre la Figure 5, la trajectoire bleue est la trajectoire globale du départ jusqu’à l’objectif tandis que la jaune est la trajectoire locale qui suit la trajectoire globale. Plusieurs séries de tests de vérification ont permis de conclure que l’approche Dijkstra pourrait générer une trajectoire globale accessible
et que la trajectoire locale générée par DWA pourrait être la trajectoire exécutable alignée sur la trajectoire globale.
La capacité à éviter les obstacles est également évaluée ici. Comme le montre la Figure 6, un obstacle imprévu qui ne figure pas sur la carte se trouve juste en face du robot. L’obstacle, qui se trouve dans la plage de balayage du scanner laser, est détecté par le robot, comme illustré dans la Figure 7. Pour vérifier si le robot serait capable d’éviter le nouvel obstacle et
de le passer, un objectif est configuré directement après l’obstacle détecté afin de déterminer comment le robot réagit à l’obstacle imprévu pour atteindre l’objectif. La planification de trajectoire locale permet de générer une carte locale comme illustré à la Figure 8, avec l’obstacle mis à jour dans la carte locale et la courbe jaune représentant la trajectoire locale générée pour éviter l’obstacle. On peut voir
que le robot ne se déplace pas en ligne droite, ce qui provoquerait une interférence avec l’obstacle, mais qu’il suit une trajectoire adaptée en contournant l’obstacle sans entrer en collision avec celui-ci. Cela confirme la capacité du robot à éviter l’obstacle statique. D’autres tests ont également été effectués avec des obstacles dynamiques capables de se déplacer sur la carte à une vitesse relativement faible et de venir à la rencontre du robot. Les résultats de ces tests montrent aussi que le robot est capable de mettre à jour sa carte locale avec la trajectoire locale générée pour éviter les collisions avec les obstacles dynamiques. Les résultats de la simulation valident l’approche hybride combinant les planifications de trajectoires globale et locale pour planifier la trajectoire du robot et éviter les obstacles.
DISCUSSION ET POINTS CLÉS
Véhicule de transport mobile autonome
Les technologies clés développées et vérifiées dans la section II sur l’élaboration de cartes et la planification de trajectoires avec SLAM améliorent la capacité de navigation autonome du robot mobile. Par rapport au Tableau 1, la technologie de navigation basée sur SLAM ne nécessite pas de placer une bande magnétique, des clous magnétiques ou un code QR au sol ou de coller la cible laser sur les murs ou des structures fixes. Il est tout à fait possible d’élaborer automatiquement la carte d’un environnement et d’éviter les collisions avec des obstacles imprévus qui ne figurent pas sur la carte. Le robot mobile basé sur SLAM est l’alternative optimale à utiliser pour développer un système de transport mobile autonome.
Une enquête a été menée auprès des unités d’entreprise de TE sur les exigences relatives au transport mobile autonome de matériel. Parmi les priorités relatives au type de transport de matériel figure la possibilité que le robot mobile transporte le chariot/rack, tire la remorque et intègre un manipulateur pour le matériel, comme indiqué dans le Tableau 3 (a). Les fonctionnalités clés présentant les niveaux de priorité élevés à mettre en œuvre sur le robot mobile autonome sont la connexion au MES, la navigation autonome et l’élaboration automatique de cartes, comme le montre le Tableau 3 (b). Parmi toutes les attentes, les unités d’entreprise ont attribué la priorité la plus élevée à l’automatisation du processus de water spider avec le robot mobile. Comme le montre la Figure 9, le water spider est le processus le plus
critique pour le transport de matériel de l’entrepôt/du magasin de matériel vers les zones de production. Il est proposé ici de développer un véhicule de transport mobile autonome (AMT) latent basé sur la technologie de navigation SLAM pour transporter le rack en vue du transport flexible de matériel comme illustré à la Figure 10. Le véhicule autonome est capable de supporter une charge utile de plus de 300 kg et de fonctionner à une vitesse de 0,8-1 m/s dans l’usine. Cette solution offre une alternative très efficace au processus de water spider manuel.
Système de transport mobile autonome
Avec la disponibilité des véhicules de transport mobiles autonomes, l’objectif est d’intégrer les véhicules au système de transport autonome (AMTS) pour développer des solutions clés en main pour les usines TE. La Figure 9 illustre le processus global de transport de matériel. La présence d’un opérateur est généralement requise pour déballer et trier le matériel dans
l’entrepôt, puis pour transférer le matériel trié dans les caisses à stocker dans le magasin de matériel. Des water spiders manuels sont utilisés pour transporter le matériel du magasin vers la zone tampon. Les lignes de production récupèrent le matériel dans la zone tampon.
Sachant que pratiquement aucune usine TE n’a encore automatisé le processus
de l’entrepôt à la ligne de production, il est proposé de commencer par l’automatisation du processus de water spider avec le véhicule de transport mobile autonome, comme illustré à la Figure 10. Le véhicule AMT fournit bien sûr des solutions d’automatisation du transport de matériel de bout en bout, du magasin de matériel à la ligne de production. Il permet un transport plus rapide et plus efficace du matériel, ce qui réduit considérablement le coût de main-d’œuvre et libère les zones tampons requises des water spiders manuels.
Pour tirer davantage profit de la capacité de connexion numérique d’un véhicule AMT aux réseaux, il est également proposé ici de numériser le processus de demande de matériel. Puisque les opérateurs/techniciens/ingénieurs utilisent couramment des smartphones, il est proposé de développer une application à installer sur les terminaux mobiles pour la demande de matériel et la communication, comme illustré à la Figure 11. Pour garantir la sécurité des communications, des applications et des véhicules AMT, mais aussi du serveur qui sera connecté aux réseaux locaux de TE, seuls les employés autorisés pourront se connecter à l’application ou accéder au système de demande de matériel, de communication et de surveillance.
L’architecture suivante est donc proposée pour le système de transport mobile autonome, comme illustré à la Figure 12. Tous les véhicules AMT sont gérés par le système de coordination central AMTS pour l’attribution des tâches, la planification des trajectoires et le contrôle du trafic.
Les applications sont également connectées au système de coordination central AMTS, et lorsque les lignes de production demandent du matériel via l’application mobile, l’opérateur du magasin de matériel reçoit la demande et prépare le matériel, puis le système de coordination central AMTS désigne un véhicule AMT chargé du
transport du matériel. Une fois que le véhicule AMT a livré le matériel aux lignes de production, les opérateurs peuvent le libérer d’un simple clic et le système de coordination central AMTS pourra lui attribuer une nouvelle tâche.
REMERCIEMENTS
Les auteurs tiennent à remercier Josef Sinder, de la BU Automotive, et Tim Darr, d’AMT Harrisburg, pour leurs suggestions et leurs indications. Ils remercient également l’équipe Automotive de Suzhou de leur avoir présenté les exigences relatives à l’automatisation du transport de matériel pour l’usine automobile de Suzhou.
RÉFÉRENCES
[1] Wang, Lim Chee, Lim Ser Yong et Marcelo H. Ang. « Hybrid of global path planning and local navigation implemented on a mobile robot in indoor environment. » Intelligent Control, 2002. Compte rendu de la conférence internationale 2002 de l’IEEE. IEEE, 2002.
[2] Skiena, S. « Dijkstra’s algorithm. » Implementing Discrete Mathematics: Combinatorics and Graph Theory with Mathematica, Reading, MA: Addison-Wesley (1990): 225-227.
[3] Duchoň, František, et al. « Path planning with modified A star algorithm for a mobile robot. » Procedia Engineering 96 (2014): 59-69.
[4] Garrido, Santiago, et al. « Path planning for mobile robot navigation using voronoi diagram and fast marching. » Intelligent Robots and Systems, Conférence internationale 2006 de l’IEEE/RSJ. IEEE, 2006.
[5] Warren, Charles W. « Global path planning using artificial potential fields. » Robotics and Automation, 1989. Proceedings., Conférence internationale 1989 de l’IEEE. IEEE, 1989.
[6] Hoy, Michael, Alexey S. Matveev et Andrey V. Savkin. « Algorithms for collision-free navigation of mobile robots in complex cluttered environments: a survey. » Robotica 33.03 (2015): 463-497.
[7] Morari, Manfred et al. « Model predictive control ». Publication préliminaire (2002).
[8] Fox, Dieter, Wolfram Burgard et Sebastian Thrun. « The dynamic window approach to collision avoidance. » IEEE Robotics & Automation Magazine 4.1 (1997): 23-33.