
Livre blanc
L’avenir des systèmes sans pilote
L’environnement naval crée des défis uniques (pression, inondation, corrosion) pour alimenter de manière fiable les UUV et les USV. Les solutions de connectivité de TE sont conçues pour relever ces défis.
Auteur :
Gregory Powers, ancien directeur du développement des marchés, aérospatiale, défense et marine au niveau mondial. Greg n’est plus chez TE.
Le domaine de la robotique couvre tous les environnements connus de l’homme : mer, terre, air et espace. Nombreux sont ceux qui, lorsqu’ils pensent aux systèmes télépilotés, voient des drones (UAV), ou des sondes spatiales et des rovers planétaires. Outre les drones, les véhicules sous-marins sans pilote (UUV) et les navires de surface sans pilote (USV) ont également commencé à faire les gros titres en matière de sécurité et de défense. De même, les véhicules terrestres sans pilote (UGV) occupent désormais le devant de la scène. La marine américaine expérimente même un robot humanoïde (SAFFiR) pour combattre les incendies à bord des navires en tant que premier intervenant.
La plupart des drones utilisent des liaisons de données légères et disposent généralement d’un environnement dégagé pour converser en temps réel avec les stations de réception.
Chacun de ces systèmes sans pilote est destiné à fonctionner dans un environnement et un écosystème où une machine peut soit augmenter, soit remplacer un humain. Les raisons en sont la sécurité, les préoccupations environnementales, la supériorité technologique ou les coûts. L’envoi d’un véhicule sans pilote peut être moins dangereux et moins coûteux que l’envoi d’un humain. Les exigences de l’application déterminent la technologie des blocs de construction électromécaniques utilisés pour créer le robot, et ces solutions peuvent aller du plus banal au plus extrême. Des paradigmes technologiques et économiques remarquables sont associés à chaque mission et conduisent les ingénieurs à choisir des solutions de connectivité spécifiques.
Drones – SwaP et bande passante
Qu’ils soient lancés à l’épaule ou sur porteur, les drones sont avant tout une question de SWaP (taille, poids, puissance) et de bande passante. Une construction légère, y compris des solutions de connectivité, est primordiale pour permettre une charge utile, une portée et une durée de vie maximales. Si le traitement des signaux à haut débit est important pour la surveillance et les applications similaires, la bande passante de communication est plus facilement gérée dans les drones que dans les autres véhicules sans pilote. La plupart des drones utilisent des liaisons de données légères et disposent généralement d’un environnement dégagé pour converser en temps réel avec les stations de réception. En raison de leur environnement, les UAV bénéficient d’équipements de distribution de puissance légers et de grande capacité. Les câbles et les composants du faisceau sont devenus plus légers au fil des ans. Les matériaux d’isolation et de gaine réticulés permettent de réduire considérablement l’épaisseur des parois, ce qui permet de gagner de la place et d’économiser du poids. Puisque chaque gramme compte, TE Connectivity (TE) a récemment lancé des gaines thermorétractables qui sont jusqu’à 20 % plus légères que les pièces qu’elles peuvent remplacer. Dans de nombreux cas, la connectivité par fibre optique a été mise en œuvre pour illustrer le faible poids, la large bande passante et l’immunité aux interférences électromagnétiques.
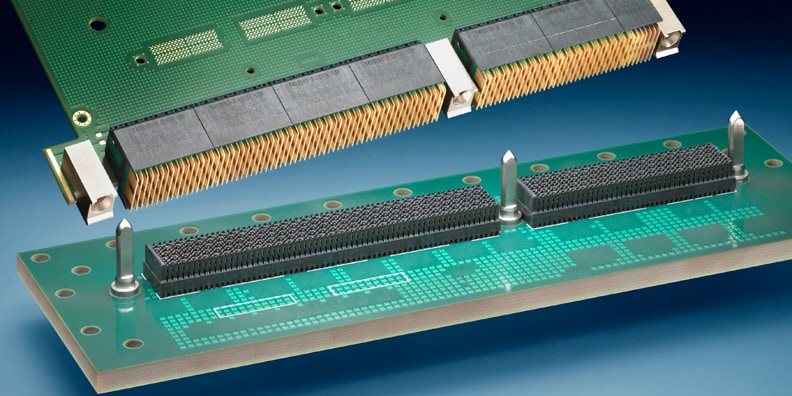
Le traitement local des images et du renseignement sur les signaux permet à l’UAV de trier et de hiérarchiser les données à transmettre à la station de réception. La sophistication des traitements s’accompagne d’un besoin d’informatique embarquée à haut débit. Le connecteur de fond de panier MULTIGIG RT 2-R standard VITA 46 VPX de TE (Figure 1) répond à ce besoin. Le connecteur VPX à architecture ouverte est modulaire et évolutif pour une flexibilité d’application, et offre à des débits supérieurs à 10 Gbit/s pour une excellente densité fonctionnelle. Les concepteurs d’UAV profitent également des progrès réalisés dans le domaine des composites et de la métallisation sélective pour créer des boîtiers composites et des antennes intégrées.
UGV – Robustes et économiques
La conception des UGV a traditionnellement fait de la réduction des coûts une priorité absolue. Cela s’explique notamment par le nombre potentiellement élevé d’unités produites, la nature moins difficile de l’environnement terrestre et le fait que les UGV sont souvent considérés comme des consommables. Néanmoins, on attend des UGV qu’ils soient robustes et performants en cas de besoin, ce qui pousse les concepteurs à trouver le juste milieu entre coût et performance. Les UGV vont des petits rovers peu coûteux qui peuvent être équipés d’une caméra ou d’un autre capteur aux systèmes multifonctionnels à haute capacité. Compte tenu de la grande diversité de ces plateformes, les solutions de connectivité vont des connecteurs commerciaux, industriels ou pour véhicules aux connecteurs conformes aux normes militaires. Dans chaque cas, les solutions de connectivité doivent être conçues de manière appropriée pour s’adapter à l’application.
Les véhicules tels que les Humvees et les camions de soutien logistique sont conçus pour fonctionner en mode habité ou non habité.
À une extrémité, on trouve des systèmes relativement basiques, peu coûteux et potentiellement consommables. Les véhicules tels que les Humvees et les camions de soutien logistique sont conçus pour fonctionner en mode habité ou non habité. Ils peuvent utiliser des connecteurs pour véhicules résistants aux intempéries, des connecteurs d’entrée/sortie IP67 et des connecteurs circulaires militaires ou de qualité militaire Les connecteurs MIL-DTL-38999 et leurs proches parents restent l’un des choix les plus populaires pour une interconnexion renforcée. Au-delà d’un connecteur entièrement certifié militaire, une grande variété de connecteurs utilisent la coque 38999 familière comme taille de base. La nouvelle génération de connecteurs circulaires COTS de style militaire est idéale pour les UGV. Par exemple, les connecteurs Wildcat Micro et 38999 de TE sont basés sur la conception de connecteurs circulaires militaires. Avec entre 3 et 9 contacts, le mécanisme de verrouillage par baïonnette Wildcat Micro est très robuste et permet un couplage rapide et positif. Une option de raccordement fileté anti-vibrations à triple démarrage est également disponible, ainsi que diverses options de montage et des accessoires arrière.

Basés sur la norme Mil-DTL-38999, les connecteurs Wildcat 38999 sont disponibles en quatre tailles de boîtier avec entre 11 et 64 contacts et offrent presque le double de la densité de contacts des connecteurs 38999 traditionnels. Le filetage de raccordement à triple démarrage offre un engagement robuste et de haute fiabilité qui résiste bien aux chocs et aux fortes vibrations. En outre, les connecteurs sont entièrement étanches, une caractéristique essentielle pour un fonctionnement par tous les temps ou une immersion potentielle au cours d’une mission. Au-delà de la robustesse et de la haute densité, de nombreux systèmes de capteurs présents sur les systèmes sans pilote exigent de la bande passante. Le connecteur CeeLok FAS-X de TE prend en charge l’Ethernet à 10 Gb/s dans une coque 38999, ce qui permet d’accueillir un seul canal Ethernet dans une coque de taille 11 ou quatre canaux dans une coque de taille 25. L’un des avantages des connecteurs dérivés du 38999 est qu’ils peuvent utiliser les mêmes capots et autres accessoires facilement disponibles.
UUV – Environnement difficile
L’environnement naval présente des défis uniques, notamment en termes de résistance aux pressions sous-marines, de fonctionnement dans un environnement immergé et de protection contre la corrosion due au sel. L’électronique est souvent logée dans des enceintes de confinement ou des unités remplaçables en ligne (LRU). Soumis aux effets de l’hydrodynamique, les UUV qui sont censés fonctionner à une vitesse significative présentent le plus souvent une section frontale minimale ou sont en forme de torpille et l’espace est y très limité. Les besoins en matière de performances sous-marines ainsi que les densités plus élevées permettant de gagner de l’espace et d’économiser du poids, deux critères souvent en conflit. Compte tenu des défis d’emballage qui en résultent, les connecteurs renforcés et compacts, comme les connecteurs à accouplement sec SEACON MINI-CON de TE, fonctionnent bien dans l’environnement UUV. Les connecteurs SEACON MINI-CON de TE ont été développés comme un système de petit diamètre, haute densité et haute pression, disponible en 13 tailles de coque et avec jusqu’à 203 contacts. Le connecteur standard résiste à 16 000 psi, mais des versions à pression plus élevée sont disponibles.

Les connecteurs à accouplement humide ont tendance à être plus grands, car ils nécessitent à la fois un équilibrage de la pression et un mécanisme pour étanchéifier les contacts du connecteur non accouplé. Ils ont également besoin d’une entrée généreuse pour permettre l’accouplement correct des moitiés de connecteur par un UUV dans un environnement sous-marin. Si les connecteurs à accouplement humide sont utilisés depuis longtemps dans la production pétrolière sous-marine, ils peuvent également être utilisés dans des applications navales telles qu’un système d’amarrage sous-marin pour les UUV. Il reste à créer des véhicules sous-marins autonomes. Les véhicules télécommandés utilisés dans les applications pétrolières et gazières sont contrôlés directement via un long câble ombilical pour l’alimentation, le contrôle et les données. Les lignes électriques et les câbles fibre optique intégré au câble ombilical fournissent une puissance et une bande passante adéquates. Cependant, la portée, la liberté et la furtivité des véhicules télécommandés (ROV) qui y sont attachés peuvent être problématiques dans les applications de défense.
Chaque environnement (mer, terre, air et espace) comporte ses propres défis et a un effet profond sur la conception du système sans pilote.
Le fonctionnement autonome sans attache peut créer son propre ensemble de problèmes, notamment en ce qui concerne les moyens de communication et l’alimentation en énergie. Un véhicule sous-marin ne dispose pas des mêmes capacités de communication sans fil qu’un UAV ou UGV. L’eau ne transmet pas bien les signaux RF. Si les communications acoustiques ou les antennes remorquées à basse fréquence permettent un certain degré de communication, elles ne sont pas efficaces pour les charges utiles de données plus importantes. Pour pouvoir utiliser des signaux acoustiques, l’UUV doit souvent tout simplement faire surface pour envoyer ou recevoir des communications. Une fois à la surface, l’UUV dispose de capacités de communication claires, soit avec des navires proches, soit avec des satellites. En raison de ces problèmes de communication, de nombreux UUV n’effectuent pas de traitement intensif des signaux à bord. Contrairement au traitement lourd du signal effectué par un UAV pour obtenir des photos et des vidéos à haute résolution, les besoins d’un UUV ont tendance à être plus humbles. Si l’ordinateur embarqué est bien protégé de l’eau et de la pression, son environnement d’exploitation est relativement bénin, si ce n’est les vibrations et les chocs que les drones (UAV) et les UGV peuvent subir. Les systèmes informatiques embarqués COTS fourniront la puissance de traitement requise, la robustesse mécanique et environnementale nécessaire. Des connecteurs étanches sont nécessaires entre l’environnement protégé et le reste de l’UUV. L’alimentation électrique des UUV se fait généralement par batterie. Les dernières technologies en matière de batteries, ainsi que des systèmes de distribution de puissance efficaces et à faible consommation d’énergie sont essentiels pour la portée et le succès de la mission. La minimisation du SWaP est un thème commun dans la conception de systèmes sans pilote.
Un mode téléguidé
À mesure que les capteurs, les logiciels et les technologies de traitement évoluent, l’efficacité et la présence des systèmes robotiques sans pilote augmentent également. Mais une chose ne change pas : les défis environnementaux auxquels sont confrontés les systèmes robotiques. Chaque environnement (mer, terre, air et espace) comporte ses propres défis et a un effet profond sur la conception du système sans pilote. Ces défis vont du plus élémentaire, par exemple le choix des matériaux, au plus élevé, comme le niveau d’autonomie requis. De même, le rôle de la connectivité et la gamme de solutions disponibles pour le concepteur sont affectés par l’environnement du système sans pilote. À mesure que la science de l’interconnexion fusionne format et fonction, le rôle de la connectivité continuera à gagner en importance dans l’avenir de la conception des systèmes téléguidés.
