
PASSER AU NUMÉRIQUE
Découvrez pourquoi de plus en plus d’utilisateurs de capteurs de position LVDT conçoivent des systèmes utilisant des sorties numériques.
Lorsqu’on utilise un capteur de type LVDT pour surveiller des paramètres de fonctionnement tels que le mouvement et la position, les communications numériques offrent la plus grande précision car le signal de sortie du capteur ne se dégrade pas facilement. Le bruit excessif généré par des environnements tels que les champs pétrolifères et les turbines peut entraîner des résultats incorrects et des erreurs de non-linéarité à mesure que les systèmes analogiques deviennent plus complexes. Avec une plus grande immunité au bruit, les systèmes numériques ont une capacité accrue à gérer les erreurs et peuvent fournir un signal complet provenant d’un LVDT et d’autres capteurs vers des logiciels informatiques et d’autres programmes.

Dans le domaine des communications en réseau, les communications numériques permettent de connecter en guirlande plusieurs conditionneurs de signaux sur une ligne de bus, ce qui permet de réduire les coûts de câblage ; parmi les autres avantages, on trouve la réduction des cartes et du câblage E/S, de l’encombrement et du poids. Avec une sortie numérique RS-485, des câbles plus longs (jusqu’à 4 000 pieds) peuvent être utilisés allant du capteur au système d’acquisition de données, avec plusieurs capteurs intégrés le long d’un câble au lieu d’en avoir un seul par câble. Des câbles plus longs permettent de placer des capteurs dans des conditions difficiles, tout en préservant l’électronique dans des environnements stables.
Comment passer au numérique
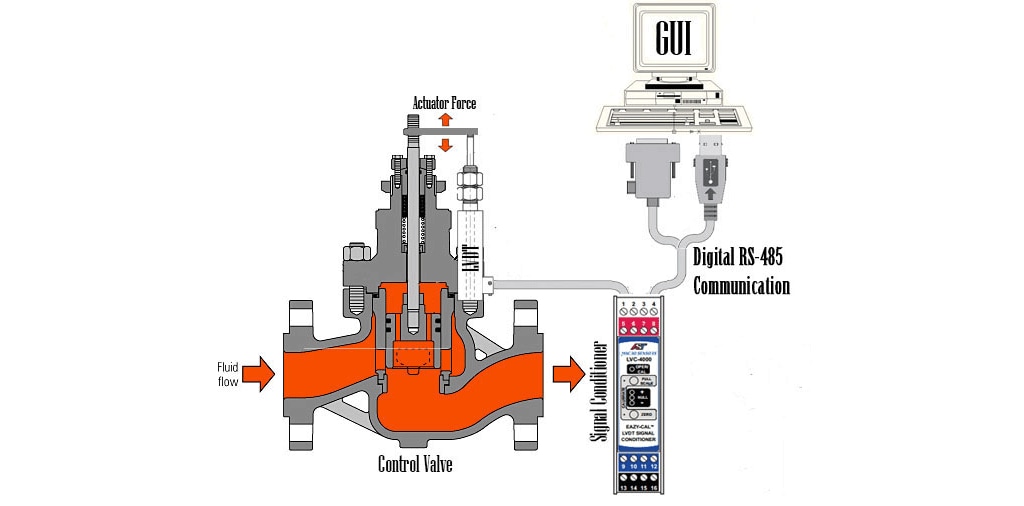
Les sorties numériques peuvent être dérivées de n’importe quel capteur standard à l’aide d’un conditionneur de signal conçu pour fournir un signal numérique RS-485. Par exemple, le conditionneur de signaux LVDT/RVDT LVC-4000 de TE Connectivity (TE) s’interface avec une large gamme de capteurs de position LVDT, RVDT et demi-pont VR à courant alternatif et offre aux clients la possibilité d’utiliser un signal analogique 4-20 mA ou un signal numérique (RS-485). Les deux sorties peuvent être utilisées pour des besoins différents ou en fonction des préférences de l’utilisateur. Grâce au port RS-485, un ordinateur hôte est en mesure de récupérer les données de mesure, de recevoir l’état de fonctionnement, d’effectuer un étalonnage à distance et de procéder à une reconfiguration à chaud. La synchronisation avec d’autres conditionneurs de signaux est réalisée via une connexion en guirlande à un bus de synchronisation. Une unité assumera la fonction principale basée sur le réglage de priorité du commutateur DIP (simple en ligne). Si une erreur devait se produire, l’unité qui prend le relais comme unité principale est celle qui a la priorité la plus élevée.

