Connexions sans contact
Nos capteurs magnétiques fournissent des données précises et fiables, sans contact physique.
Les capteurs qui contrôlent des propriétés telles que la température, la pression, la déformation ou le débit fournissent un signal de sortie directement lié au paramètre concerné. Les capteurs magnétiques, quant à eux, diffèrent de la plupart de ces détecteurs, car très souvent ils ne mesurent pas directement la propriété physique en question. Ils détectent les changements ou les perturbations des champs magnétiques qui ont été créés ou modifiés par des objets ou des phénomènes. Les champs magnétiques peuvent donc transmettre des informations sur des propriétés telles que la direction, la présence, la rotation, l’angle ou les courants électriques, qui sont converties en tension électrique par le capteur magnétique. Seuls quelques capteurs peuvent mesurer les champs magnétiques de manière absolue, tels que les champs magnétiques terrestres utilisés pour déterminer la direction.
Le signal de sortie doit être traité pour être converti en une valeur souhaitée. La distribution d’un champ magnétique dépend de la distance et de la forme de l’objet générateur ou perturbateur (c’est-à-dire un aimant, un courant, etc.) ou du phénomène. Il est donc important de toujours tenir compte à la fois du capteur et de l’objet générateur lors de la conception de l’application. Bien que les capteurs magnétiques soient un peu plus difficiles à utiliser, ils sont capables de délivrer des données précises et fiables, sans contact physique.
EFFET MAGNÉTORÉSISTIF
L’origine physique de l’effet de magnétorésistance dans les métaux de transition réside dans la dépendance de la diffusion des électrons par rapport à la direction de la magnétisation. Dans les métaux de transition, les principaux porteurs de courant sont les électrons 4s, car ils ont une mobilité plus élevée que les électrons 3d. On peut constater que la diffusion des électrons de la bande s vers la bande d est plus élevée lorsque les électrons se déplacent parallèlement à la magnétisation.
Ponts de Wheatstone
Dans la plupart des applications, l’élément de Hunt n’est pas adapté, car il ne fournit pas de référence zéro. Cet inconvénient, ainsi que la dépendance de la résistance à la température, peuvent être évités en utilisant un pont de Wheatstone.
Unités magnétiques
Pour un lecteur qui n’est pas un spécialiste du magnétisme, la situation est assez confuse en ce qui concerne les unités magnétiques. Le tableau suivant permet de trouver rapidement des éléments de conversion entre les différentes unités utilisées :
| Unité 1 | Multiplier par | = Unité 2 | Remarque |
|---|---|---|---|
| Tesla | 104 | Gauss | |
| Oerstedt |
1 | Gauss | μr = 1 ! |
| Oerstedt | 79,58 | A/m | 103/(4xπ) |
| Weber | 108 | Maxwell |
Tableau 1 : Facteurs de conversion pour les unités magnétiques ; pour plus d’informations, reportez-vous à la page du NIST.
CAPTEURS MAGNÉTORÉSISTIFS
Types de capteurs par champ magnétique
Les capteurs magnétorésistifs peuvent être divisés en deux groupes. Dans les applications à champ élevé, par exemple lorsque l’intensité du champ appliqué est suffisamment forte pour saturer le matériau doux du capteur magnétique (pour H>10 kA/m environ), le vecteur de magnétisation dans le capteur est (presque) toujours parallèle au champ appliqué. Une des utilisations classiques d’un capteur magnétorésistif à champ élevé est pour les capteurs angulaires sans contact, tels que le KMT32B, le KMT36H ou les capteurs de position MLS. Dans les applications à faible champ, le vecteur de magnétisation est principalement déterminé par la forme des bandes, car la magnétisation affiche une préférence naturelle pour la direction longitudinale. Le champ externe provoque une torsion α de la magnétisation dans la bande, ce qui modifie la résistance due à l’effet MR. Les capteurs linéaires à faible champ comme la matrice MR174B, les capteurs KMY et les capteurs de proximité comme le MS32 fonctionnent généralement dans ce mode.
Capteurs MR
Avec courbe de transfert linéarisée
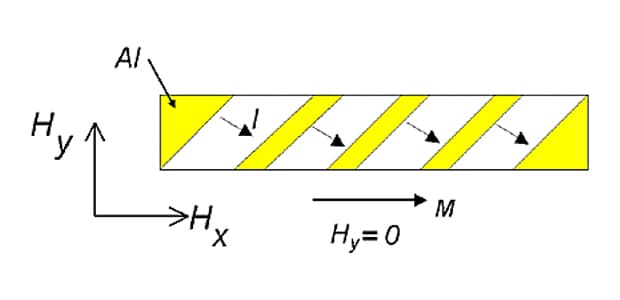
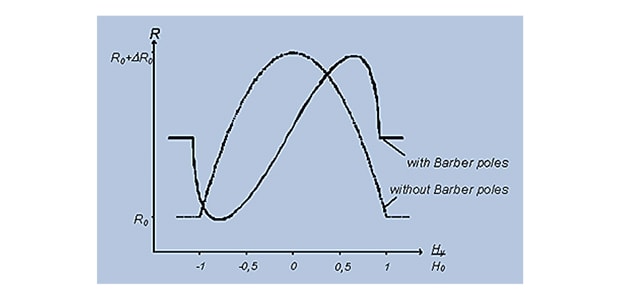
L’application de faibles champs magnétiques à un élément de Hunt n’entraîne que de faibles variations de la magnétisation et, en retour, le cos de la formule (1) ne varie pratiquement pas lors des petits changements de α. Un élément de Hunt n’est pas sensible aux faibles intensités de champ. Afin de rendre le capteur MR sensible aux faibles champs magnétiques, la courbe de transfert MR (1) doit être modifiée. Le moyen le plus courant est d’utiliser des « barber poles » (voir la figure 2).
De petites barres hautement conductrices – les « barber poles » – sont placées sur le permalloy. Elles shunteront le courant dans le Permalloy et modifieront le chemin du courant en raison de leur géométrie, mais elles ne changeront pas le comportement magnétique. Le courant entre les interstices des « barber poles » empruntera le chemin le plus court, à savoir le chemin perpendiculaire aux « barber poles ».
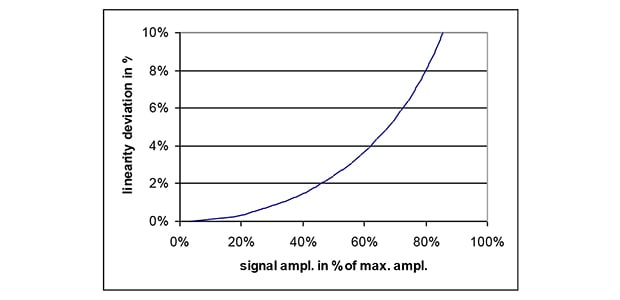
Linéarité du capteur
La linéarité du signal de sortie du capteur dépend du rapport entre l’amplitude réelle du signal et l’amplitude maximale de latension de sortie. La Figure 4 montre l’écart de linéarité par rapport à ce quotient (en pourcentage) :
Stabilité du capteur
L’énergie magnétostatique est la même pour un domaine magnétique, qu’il soit par exemple parallèle ou antiparallèle au champ externe. En d’autres termes, les domaines magnétiques peuvent fluctuer entre deux directions dans un environnement stable. Ceci n’est pas un problème dans le cas des capteurs à champ élevé, car la courbe de transfert est quadratique dans α, mais cela a des effets dramatiques dans le cas d’un capteur de type « barber pole », car le signal de sortie change également de signe.
De ce fait, les capteurs magnétorésistifs à faible champ, tels que les capteurs « barber pole », doivent être stabilisés (polarisés) par un champ externe supplémentaire (Hx), qui est orienté de manière favorable le long de la bande MR (c'est-à-dire dans la direction x). La seule fonction de ce champ est de définir une direction préférentielle pour l'alignement des domaines magnétiques. Le champ de polarisation doit être suffisamment fort pour que les champs perturbateurs ne puissent pas changer de domaine. Il a été constaté empiriquement, que des intensités de champ de polarisation supérieures à environ 2,5 kA/m garantissent le bon fonctionnement du capteur.
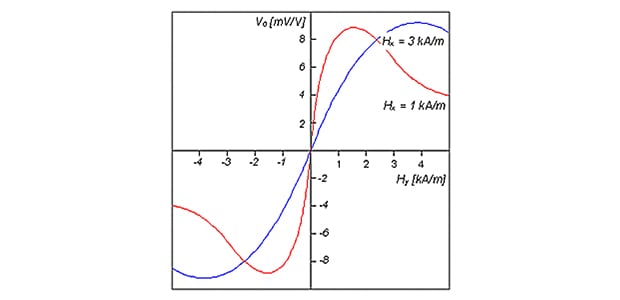
Champs de polarisation plus faibles
Il faut garder à l’esprit qu’un champ de polarisation modifie la sensibilité du capteur. C’est ce que montrent la figure 6 et le tableau 2.
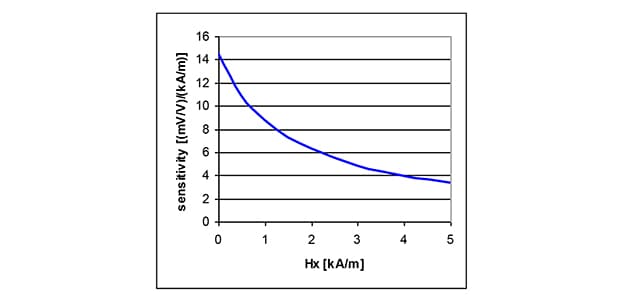
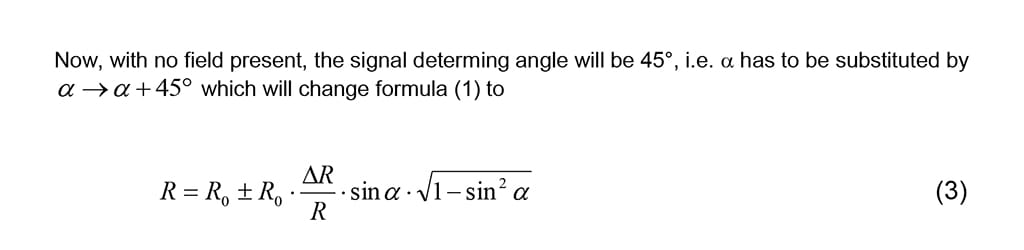
Dans certaines applications, une sensibilité élevée est souhaitée. Dans ce cas, il est possible de travailler sans champ de polarisation. Pour ce faire, le capteur doit être bien préconditionné : juste avant la mesure, la magnétisation est inversée par une courte impulsion magnétique dans une direction x définie (prémagnétisation). Afin d’éviter que la magnétisation par bande ne s’inverse pendant la période entre la prémagnétisation et la mesure, les champs externes doivent être limités à environ moins de 0,5 kA/m.
| Champ de polarisation Hx en kA/m |
Plage du champ d’opération en kA/m |
Sensibilité S en mV/V/kA/m | Champ maximum Hy, max en kA/M |
Remarque |
| 0 | 0,35 | 14 | 0,5 | Prémagnétisation nécessaire |
| 1 | 0,5 | 10,5 | 0,5 | Prémagnétisation nécessaire |
| 2 | 1,1 | 6,3 | 1 | Prémagnétisation recommandée |
| 3 | 1,4 | 4,9 | ∞ | Stable |
| 5 | 2 | 3,4 | ∞ | Stable |
Tableau 2 : Sensibilité et zone de fonctionnement recommandée.
Aimants permanents et capteurs de type « barber pole »
Le champ Hx stabilisateur est généralement produit par un aimant permanent. En utilisant KMY20S ou KMZ20S, le client doit appliquer un aimant permanent pour générer le champ de polarisation requis. KMY20M et KMZ20M sont équipés d’un aimant interne en ferrite dure. L’intensité maximale du champ externe n’est limitée que par la stabilité du matériau de l’aimant permanent. Dans le cas des types KMY20M et KMZ20M, des champs perturbateurs supérieurs à environ 40 kA/m (500 Gauss) peuvent modifier la direction de magnétisation de l’aimant permanent de manière irréversible. Cela peut entraîner une modification permanente de la tension de décalage et donc endommager le capteur. Cette limitation peut être contournée en utilisant des capteurs de type S en combinaison avec d'autres aimants, tels que des aimants en terres rares, qui doivent être fournis par l'utilisateur.
Température
La résistance ohmique et la magnétorésistance proviennent toutes deux de processus de diffusion des électrons conducteurs. Comme tous les processus de diffusion dépendent de la température, la résistance du pont et l'effet MR ∆R/R présentent également une dépendance à la température. Les coefficients de température sont généralement liés à deux températures via :
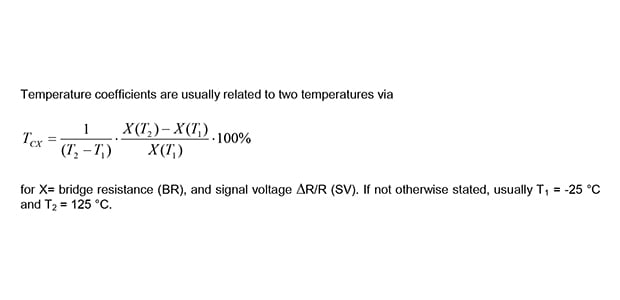
Dans le cas du Permalloy, la résistance du pont et le coefficient de température de l’amplitude ont à peu près la même valeur, mais diffèrent par le signe TCBR≈-TCSV.
Cela permet à l’utilisateur de compenser la dépendance de la sensibilité à la température en utilisant une alimentation à courant constant. Dans ce cas, la tension d’alimentation augmente avec la hausse de la température et de la résistance du pont. Cet effet provoque une augmentation de la tension de sortie, ce qui compense la perte de sensibilité.
Une autre valeur importante est le coefficient de température du décalage. Ce coefficient de température est dû à de petites différences dans le comportement thermique des quatre résistances du pont. Dans la pratique, on observe une dérive de la tension de sortie, qui ne peut pas être séparée du signal de sortie normal causé par les champs magnétiques. Dans les applications utilisant le couplage de signaux CC, le coefficient de température du décalage limite ainsi la précision de la mesure.
Le permalloy est un matériau très robuste qui peut résister à des températures très élevées jusqu’à environ 300 °C lorsqu’il est protégé par un revêtement. Dans ce cas, le boîtier est le facteur limitant.

Andreas Voss présente en détail la technologie des capteurs magnétorésistifs les applications de la technologie des capteurs.