
Livre blanc
Fusion de capteurs dans les capteurs d’inclinaison
Découvrez comment la fusion de capteurs joue un rôle essentiel dans la nouvelle génération de capteurs d’inclinaison.
INTRODUCTION
Un capteur d’inclinaison fournit des informations sur l’inclinaison angulaire par rapport à la force gravitationnelle. Ces informations peuvent être utilisées pour surveiller l’état des équipements ou pour contrôler les caractéristiques d’un appareil ou d’un véhicule. Différents types de capteurs sont également utilisés dans différentes applications. Les capteurs d’inclinaison peu coûteux, montés en surface, sont de plus en plus populaires dans les technologies portables. Ils sont utilisés pour surveiller l’angle auquel un téléphone est tenu pour la fonction de rotation automatique. Un autre exemple est l’utilisation de capteurs d’inclinaison dans les consoles de jeu.
Les capteurs d’inclinaison robustes sont utilisés dans une large gamme de machines industrielles ainsi que dans une gamme de véhicules routiers et non routiers et d’équipements de construction. Ces capteurs sont utilisés pour une variété de fonctions, y compris le contrôle de la conduite, le nivellement de la cabine, la mesure de l’angle de la flèche ainsi que la protection contre le basculement. À mesure que de nouvelles exigences de sécurité sont imposées aux véhicules et équipements de construction, ces capteurs deviennent nécessaires pour surveiller l’inclinaison afin d’assurer la sécurité de l’opérateur et des personnes à proximité.
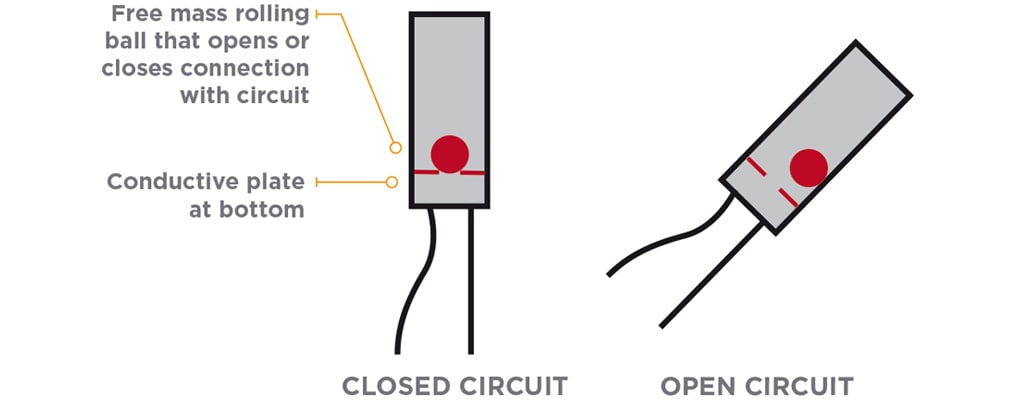
La technologie des capteurs d’inclinaison a évolué au fil des ans, passant de simples commutateurs d’inclinaison à des capteurs entièrement électroniques sophistiqués qui combinent plusieurs technologies de détection. Il y a de nombreuses années, ces appareils n’étaient pas des capteurs, mais des commutateurs constitués d’une boule roulante avec une plaque conductrice en dessous. Les commutateurs ont été conçus de manière à ce qu’un niveau d’inclinaison suffisant permette à la bille de rouler vers le bas et de former une connexion électrique avec la plaque, ce signal pouvant ensuite être utilisé comme indicateur ou pour allumer ou éteindre quelque chose.
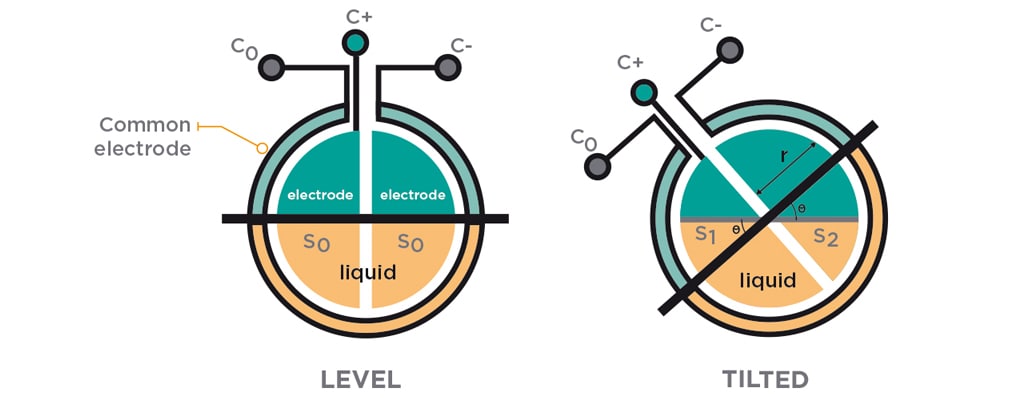
Les premiers capteurs d’inclinaison contenaient des liquides résistifs ou capacitifs à l’intérieur d’une cavité scellée. Lorsque la capsule bascule d’un bout à l’autre, le liquide s’écoule d’un côté ou de l’autre, ce qui modifie la résistance ou la capacité d’un circuit interne. La sortie du circuit peut être contrôlée directement, ou la sortie peut être amplifiée ou traduite dans d’autres formats de sortie. Ces capteurs pouvaient fournir des données d’inclinaison précises et fiables dans de nombreuses applications, mais ils présentaient plusieurs inconvénients, notamment une réponse lente, une sensibilité aux vibrations et aux remous et une durée de vie limitée.
LES CAPTEURS MODERNES D’INCLINAISON UTILISENT GÉNÉRALEMENT LA TECHNOLOGIE DES SYSTÈMES MICROÉLECTROMÉCANIQUES (MEMS).
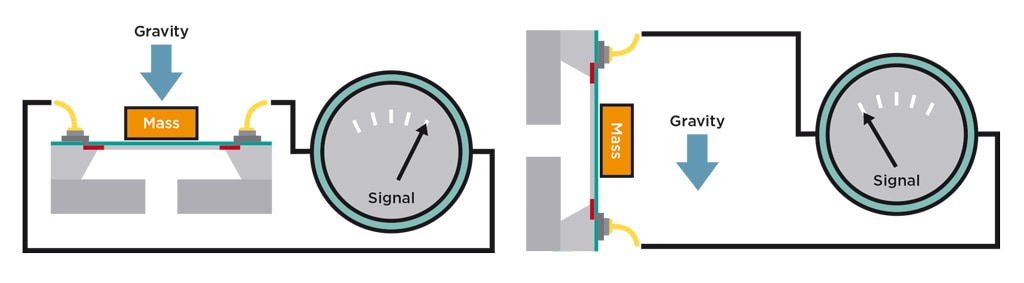
Les MEMS à semi-conducteurs sont des capteurs de petite taille, car ils sont constitués de plaques de masse d’épreuve mobiles qui sont fixées à un cadre de référence par un système de suspension mécanique. Il s’agit d’une technique consistant à combiner des composants mécaniques et électriques sur une puce pour générer un système aux dimensions miniatures. Pour un capteur d’inclinaison basé sur un MEMS, une masse est ajoutée à la matrice en silicium du capteur. En position horizontale, la force de gravité dévie la matrice (comme l’application de pression) et produit une sortie électrique. Lorsque la matrice est tournée en position verticale, la force sur la matrice devient nulle, tout comme la sortie électrique. La sortie est un nombre de complément 16 bits en 2 qui représente l’angle d’inclinaison en degrés. Le capteur d’inclinaison basé sur MEMS a résolu de nombreux problèmes liés aux technologies à base de liquide.
Le fonctionnement et la précision d’un capteur d’inclinaison sont affectés par de nombreux facteurs. Certains de ces facteurs sont la gravité, la température, l’étalonnage du capteur d’inclinaison, la linéarité et la sensibilité à l’axe transversal. Voici quelques-unes des principales spécifications d’un capteur d’inclinaison :
- Nombre d’axes : le nombre d’axes est un facteur important, car il varie d’une application à l’autre. En robotique, on utilise un capteur d’inclinaison à deux axes. Un capteur d’inclinaison à trois axes est nécessaire dans les manettes de jeux vidéo. Dans certains smartphones, des capteurs à quatre axes sont utilisés.
- Résolution : l’inclinaison minimale détectée et la sortie par le capteur
- Plage de mesure : la plage d’inclinaison pouvant être gérée par le capteur. Certains capteurs sont capables de mesurer seulement 10° tandis que d’autres peuvent couvrir une plage allant jusqu’à 60°, 75° ou même 90°.
- Tolérance au bruit : le bruit a tendance à provoquer des distorsions harmoniques dans la fonction du capteur, entraînant une variation de sortie et une réduction du rendement du système.
- Vibrations et chocs : les vibrations peuvent perturber la fonctionnalité du capteur, d’où la nécessité de prendre des mesures de résistance aux vibrations, en particulier lorsque les capteurs sont utilisés dans des conditions difficiles, par exemple dans des véhicules tout-terrain ou sur des chantiers de construction.
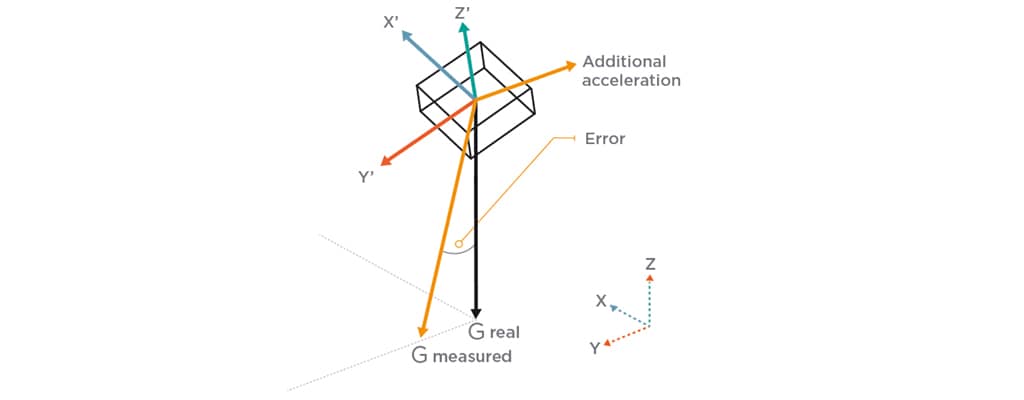
En outre, il est important de différencier les applications (quasi) statiques des applications dynamiques. Dans une application dynamique, le capteur est influencé par une accélération supplémentaire, tandis que dans les applications statiques ou au ralenti, celles-ci peuvent généralement être négligées. Pour la détection de l’inclinaison statique, les technologies de détection couramment utilisées sont strictement basées sur la gravité, notamment
- les accéléromètres qui sont aujourd’hui généralement de type MEMS
- les éléments remplis de liquide, conducteurs ou non-conducteurs avec lecture électronique
- les cavités de convection avec chauffage
- les pendules avec encodeur ou potentiomètre
L’état statique signifie que le véhicule ne bouge pas ou que le véhicule se déplace à vitesse constante et que la direction ou l’accélération est très faible. En d’autres termes, sa trajectoire est une ligne droite idéale, c’est-à-dire sans nids de poule ni virages, et les vibrations sont également minimes.
Pourquoi est-ce important lors de l’utilisation d’un capteur d’inclinaison ? Les capteurs d’inclinaison basés sur MEMS utilisent la gravité comme force d’action sur l’élément sensoriel. Une approche typique pour un capteur d’inclinaison MEMS comprend un accéléromètre à 3 axes où la gravité agit sur chaque axe individuel en fonction de l’angle d’inclinaison. Les signaux sont compensés en température et linéarisés et l’angle d’inclinaison réel est calculé à partir des données d’accélération 3D. Cependant, toute accélération supplémentaire, par exemple un changement de vitesse du véhicule, un nid de poule (choc) ou un virage, entraîne une distorsion de l’inclinaison calculée car l’accéléromètre « voit » l’accélération supplémentaire. Ceci est commun à tous les appareils basés sur la gravité et peut créer de grosses erreurs.
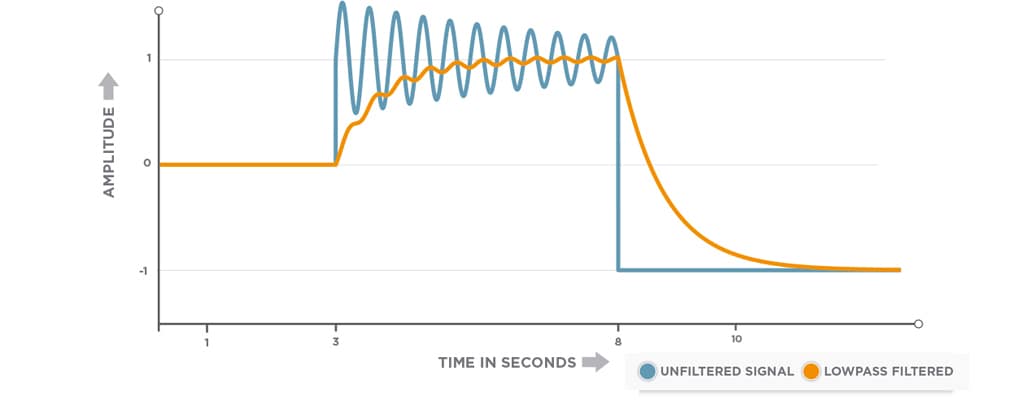
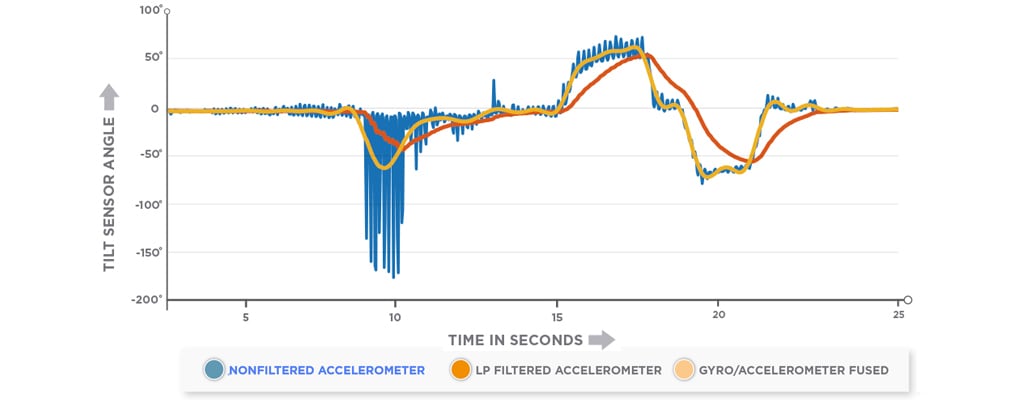
Alors que les capteurs d’inclinaison MEMS de TE Connectivity (TE) offrent une excellente précision supérieure à ±0,15° à température ambiante, une accélération supplémentaire peut entraîner des erreurs de quelques degrés. Un moyen courant de stabiliser la sortie consiste à mettre en œuvre des filtres passe-bas. Tous les capteurs d’inclinaison TE l’utilisent. Les vibrations et les chocs modérés sont suffisamment amortis de cette façon, et, dans de nombreuses applications, cela suffit et donne de bons résultats. Le principal inconvénient de l’utilisation de filtres passe-bas est qu’elle s’accompagne d’un retard dans la sortie et, de par sa nature, la sortie ne peut pas suivre les changements rapides de position. Ce n’est peut-être pas un problème, mais dans certaines applications, c’en est un. Dans certaines applications, il est nécessaire d’avoir les deux : une annulation des erreurs induites par les chocs et les vibrations d’une part et une sortie qui suit l’orientation réelle du véhicule d’autre part. Un capteur purement basé sur la gravité n’est pas une solution dans ce cas, quel que soit son mode de fonctionnement ou le type de filtrage ou de compensation effectué.
LA FUSION DES CAPTEURS EST LA SOLUTION
Cela signifie que les informations provenant de différents capteurs sont combinées pour calculer le signal de sortie. La combinaison d’un accéléromètre et d’un gyroscope est une approche puissante. La faiblesse d’un capteur est compensée par la force de l’autre.
Un capteur gyroscopique mesure la vitesse de rotation ou la vitesse angulaire autour d’un axe particulier. Par exemple, dans un avion, un gyroscope peut être utilisé pour mesurer la vitesse de rotation autour de l’axe de roulis de l’avion. Le gyroscope mesure une valeur non nulle tant que l’avion roule, mais indique zéro si le roulis s’arrête. Cela signifie que le gyroscope de roulis d’un avion en virage coordonné avec une inclinaison de 60 degrés mesure un taux de zéro, comme un avion qui vole en ligne droite et en palier. L’angle de roulis actuel peut être approximé en intégrant la vitesse de roulis dans le temps, mais pas sans qu’une erreur s’y glisse. De plus, le gyroscope dérive au fil du temps, de sorte que des erreurs supplémentaires s’accumulent progressivement, et finalement, vous avez une idée inexacte de votre angle de roulis actuel par rapport à l’horizon. Ainsi, les capteurs gyroscopiques seuls ne peuvent pas être utilisés pour maintenir un avion, un véhicule ou un équipement dans une orientation particulière. Pour la plupart des applications dynamiques, vous avez donc besoin à la fois d’un accéléromètre et d’un gyroscope pour mesurer l’inclinaison et l’évaluer correctement.
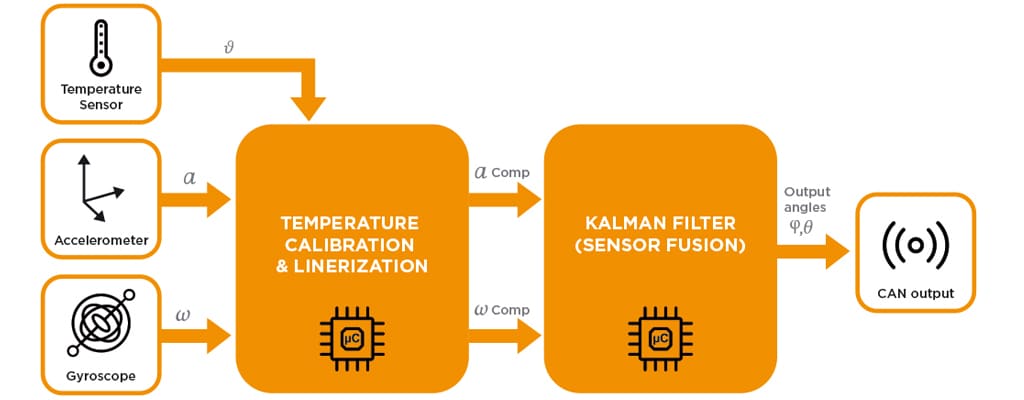
La solution AXISENSE-G de TE est un capteur d’inclinaison gyrostatique qui combine un accéléromètre à 3 axes, un gyroscope et un capteur de température ainsi qu’une unité de contrôle du moteur (MCU) sophistiquée et une interface CAN-bus dans un boîtier renforcé et compact. Les algorithmes prennent les données de différents capteurs, compensent les effets de température et les fusionnent pour produire un signal de sortie d’inclinaison stabilisé, mais rapide. Il existe différentes façons de mettre en œuvre une fusion de signaux de capteurs.
FILTRE KALMAN
TE a décidé d’utiliser le célèbre filtre Kalman dans une implémentation étendue pour combiner les données du capteur et fournir une sortie précise et fiable dans des conditions dynamiques pour le capteur d’inclinaison AXISENSE-G. Le filtrage de Kalman, également appelé estimation quadratique linéaire (LQE), est un algorithme qui utilise une série de mesures observées au fil du temps, contenant du bruit statistique et d’autres inexactitudes. Il produit des estimations de variables inconnues qui ont tendance à être plus précises que celles basées sur une seule mesure, en estimant une distribution de probabilité conjointe sur les variables pour chaque période. Le filtre porte le nom de Rudolf E. Kálmán, l’un des principaux développeurs de sa théorie.
LES AVANTAGES
Le principal avantage de la stabilisation d’un capteur d’inclinaison à l’aide d’un gyroscope est que cela réduit nettement l’effet négatif de l’accélération supplémentaire à court terme due aux changements de vitesse ou de direction, ainsi qu’aux chocs et aux vibrations. On utilise parfois le terme « IMU » (unité de mesure inertielle) pour parler des capteurs de position fusionnés. TE n’utilise pas cette formulation, car elle est généralement utilisée dans le contexte de la navigation, qui s’accompagne d’exigences différentes.
Le capteur d’inclinaison AXISENSE-G se concentre sur l’amortissement des effets à court terme. Comme il n’a pas besoin d’utiliser les informations de position globale, telles que les données GPS, le capteur est de taille compacte, facile à installer et à utiliser, robuste et fiable et très compétitif en termes de coûts. En outre, le capteur d’inclinaison AXISENSE-G de TE peut remplacer directement un capteur d’inclinaison TE standard sans gyroscope.
Récapitulatif
La technologie des capteurs d’inclinaison a évolué au fil des ans, passant de conceptions mécaniques simples à des technologies plus sophistiquées à base de liquide qui fournissent des informations précises et fiables sur l’inclinaison sur une large gamme d’angles et sur plusieurs axes. La technologie MEMS a permis de développer et d’affiner les capteurs d’inclinaison en fournissant des modèles à semi-conducteurs avec une précision et une résolution accrues, ainsi que des modèles plus robustes et plus fiables. Le filtrage et la compensation de la température ont permis une détection plus précise de l’inclinaison dans une plus large gamme d’applications, ainsi que leur utilisation dans des applications plus dynamiques. Cependant, les capteurs d’inclinaison conventionnels ne sont pas toujours assez performants dans les environnements soumis à de fortes vibrations et à des chocs. Ce problème est résolu par la fusion de capteurs, c’est-à-dire la fusion des données de l’accéléromètre et du gyroscope, ce qui donne lieu à une nouvelle génération de capteurs d’inclinaison qui restent réactifs dans des conditions dynamiques, mais sont beaucoup moins affectés par l’accélération générée dans l’application.

TE Connectivity (TE) propose le capteur d’inclinaison de nouvelle génération. Grâce à la compensation gyroscopique, cette puissante combinaison d’éléments de détection MEMS, associée à un filtrage avancé, permet d’obtenir des sorties de capteur d’inclinaison stables et très précises, capables de résister à des environnements dynamiques et difficiles. Regardez cette vidéo pour en savoir plus.

