トレンド
接触なしの接続
当社の磁気センサを使用すると、物理的な接触を介さずに、正確で信頼性の高いデータを取得できます。
磁気センサ
温度・圧力・ひずみ・フローなどの特性を監視するセンサは、必要なパラメータに直接関係する出力信号を提供します。一方磁気センサは、これらの検出器とは異なり、多くの場合、対象となる物理特性を直接測定しません。磁気センサが検出するのは、物質や事象によって発生または変化した磁場の変化や擾乱です。磁場には方向・存在・回転・角度・電流などの特性に関する情報が含まれているので、磁気センサによってその情報を電圧に変換します。磁気センサの中には、地磁場を測定する羅針盤など、純粋な磁場計測用もあります。
出力信号を必要なパラメータに変換するためには、ある程度の信号処理が必要です。当然のことながら、磁界分布は、磁気の発生や擾乱を引き起こしている物質 (磁石や電流など) との距離やその形態によって異なります。したがって、用途の設計では、常にセンサと磁気発生物質の両方を考慮する必要があります。磁気センサは、使い方がやや難しい半面、物理的な接触を介さずに正確で信頼性の高いデータを提供します。

磁気抵抗効果
磁気センサの歴史
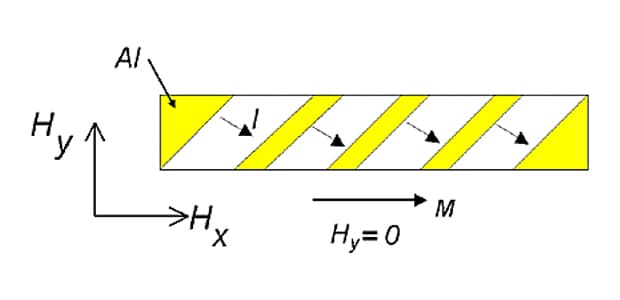
磁気抵抗効果は、1857 年に Lord Kelvin によって発見されました。彼は、鉄片を磁場に置くと電気抵抗がわずかに変化することに気がついたのです。しかし、1971 年に Hunt がはじめて磁気抵抗 (MR) センサの概念を発表するまで、それから 100 年以上の年月がかかりました。その後、IBM がハードディスク装置に磁気抵抗効果を呈するストリップを使用してビットを検出する最初の MR ヘッドを発表したのは、さらに 20 年後の 1991 年でした。初期の MR センサは、値札とバッジの読み取り装置 (読み取り専用) や磁気テープ (1985 年) といった、比較的安易な用途で使用されていました。図 1 は、Hunt 素子の幾何学的構造を示しています (センス電流 I および磁化ベクトル M を持つ磁気抵抗フィルム、α はフィルム面の電流に対する信号を決定する角度)。軟磁性の磁気センサ材料と連結する磁場 Hy によって、ストライプ相関の抵抗率が変化します。この変化は、センス電流によって詳細に分析されます。

遷移金属での磁気抵抗効果の物理的原因は、電子散乱の磁化方向依存性にあります。遷移金属では電流の主なキャリアは 4s 電子です。3d 電子より移動度が高いからです。s バンドから d バンドへの電子の散乱は電子が磁化方向と平行して移動するときに最も大きくなります。
ホイートストン ブリッジ
ほとんどの用途において、学術的な Hunt エレメントは不適です。ゼロ基準がないからです。この欠点および抵抗の温度依存性は、ホイートストン ブリッジを使用することで回避できます。
磁気単位
磁気の専門家ではない通常の読者には、磁気の単位はかなりわかりにくいものです。使用される各単位の変換係数を次の表にまとめておきます。
| 単位 1 | 乗数 | = 単位 2 | 備考 |
|---|---|---|---|
| Tesla | 104 | Gauss | |
| Oerstedt |
1 | Gauss | μr = 1 ! |
| Oerstedt | 79.58 | A/m | 103/(4xπ) |
| Weber | 108 | Maxwell |
表 1: 磁気単位の変換係数 (詳細については、NIST のホームページ. を参照してください)
磁気抵抗センサ
磁場によるセンサのタイプ
磁気抵抗センサは、基本的に 2 つのグループに分けることができます。高磁場用途では、印加磁場の磁界強度が軟磁性磁気センサ材料の飽和状態 (約 10 kA/m 未満) に近い場合、センサの磁化ベクトルは常に印加磁場と (ほぼ) 平行です。磁気抵抗高磁場センサの一般的な用途は、KMT32B、KMT36H、MLS 位置センサなどの非接触式角度センサです。低磁場用途では、磁化は縦方向を自然に選択するため、磁化ベクトルは主に被覆形状によって決まります。外部磁界は、被覆の中で磁化のねじれ α を引き起こします。それによって MR 効果による抵抗の変化が生じます。MR174B ダイなどのリニア低磁界センサ、KMY センサ、および MS32 などのスイッチング センサは、通常、このモードで動作します。
MR センサ
線形伝達曲線の製品
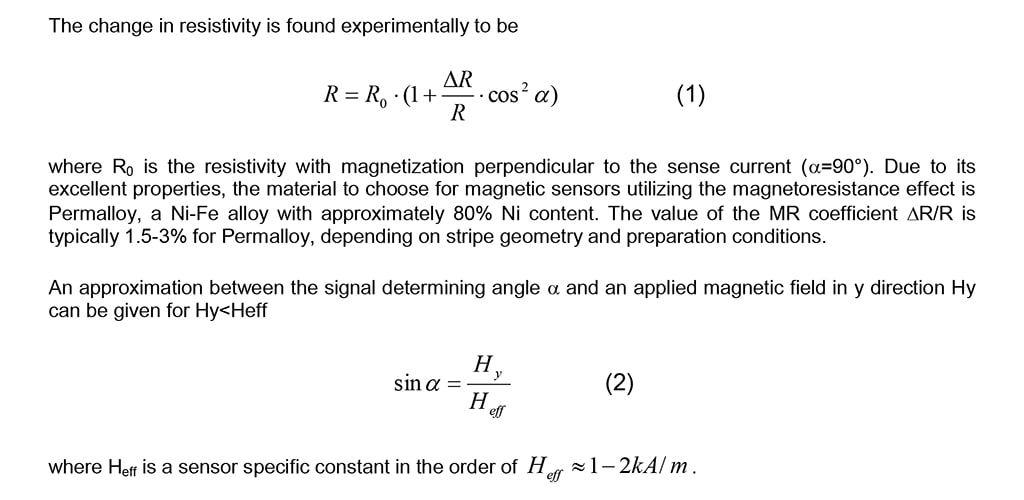
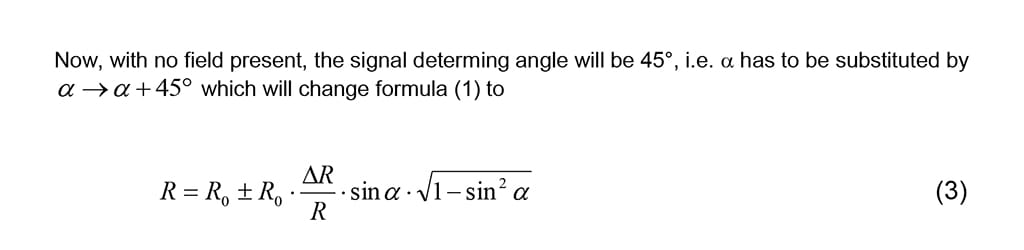
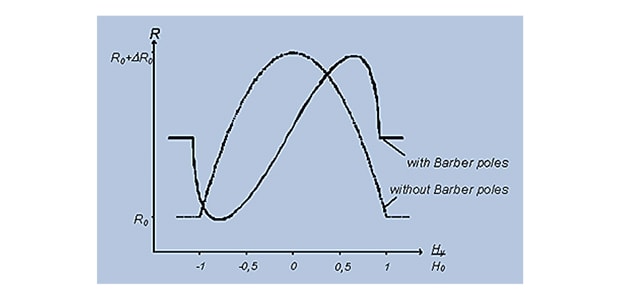
Hunt エレメントに低磁界を印加しても磁化はわずかに変化するだけです。同様に、αがわずかに変化しても式 (1) の cos の項はほとんど変化がありません。Hunt エレメントは小さな磁界強度には影響を受けません。MR センサの低磁界に対する感度を上げるためには、MR 伝達曲線 (1) が変更されなければなりません。最も一般的な方法は、バーバー ポールを使用するものです (図 2 参照)。
非常に伝導性の高い小型のバー (バーバー ポール) をパーマロイの最上部に配置します。これらのバーの形状の効果でパーマロイ内の電流が分流し、電流経路が変わります。ただし、磁気的挙動は変わりません。バーバー ポールの間の電流は最短経路をとります。たとえば、バーバー ポールに対して垂直に流れます。
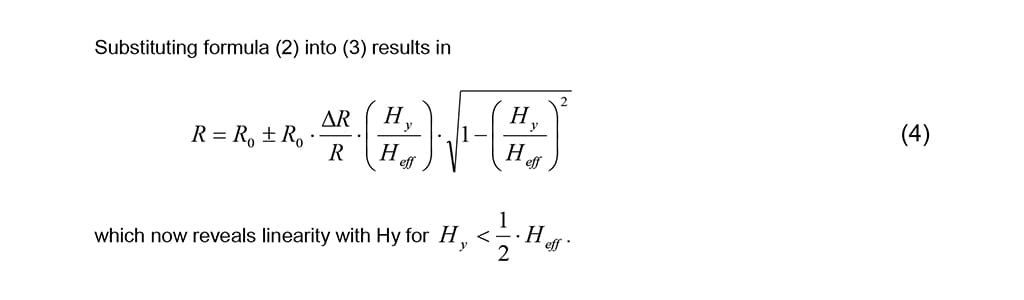
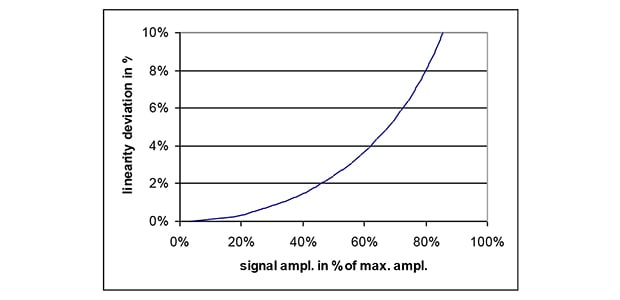
センサの線形性
センサ出力信号の線形性は、最大出力電圧振幅に対する実信号振幅の関係によって決まります。 図 4 は、この割合に関する線形性偏差を示しています (パーセント)。
センサの安定性
たとえば外部磁界に対して平行であろうが逆平行であろうが、磁区での静磁エネルギーは同じです。すなわち、安定した環境において磁区は 2 つの方に変動することがあります。 これは高磁界センサの場合は問題にはなりません。αにおいて伝達曲線が方形型になっているからです。 しかし、バーバー ポール センサの場合には大きな影響があります。出力信号が sign も変化させるからです。
この理由から、バーバー ポール センサのような低磁界磁気抵抗センサは、MR ストライプ (すなわち xdirection) に沿った方向になっている別の外部磁場 (Hx) によって安定させる (バイアスをかける) 必要があります。この磁場の役目は、優先方向を定めて磁区を調整することだけです。 バイアス磁場は、外乱磁場によって磁区が切り替わることがない程度に強力である必要があります。約 2.5 kA/m よりも強力なバイアス磁場であればセンサの適切な性能が確保されることが経験的にわかっています。
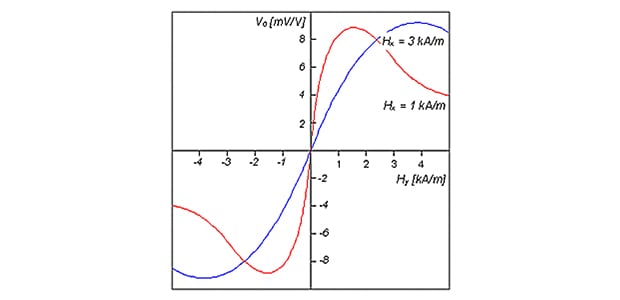
小さなバイアス磁場
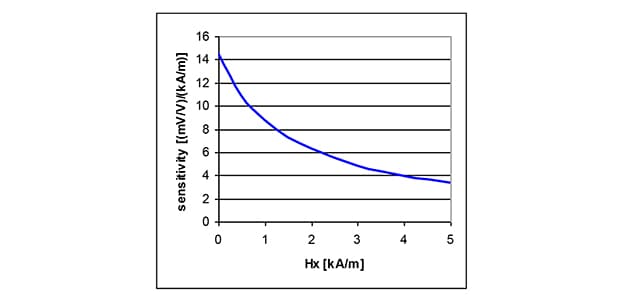
バイアス磁場がセンサの感度を変化させることに留意する必要があります。このことを図 x および 表 x に示します。
用途によっては高感度が必要とされます。この場合は、バイアス磁場なしで動作させることができます。そのためには、センサがあらかじめよく調整されている必要があります。すなわち、測定の直前に短い磁気パルスによって磁化を定義済みの x 方向に倒します (前磁化)。 前磁化と測定の間の時間のフリップによるストライプの磁化を防ぐために、外部界磁を約 0.5 kA/m 未満に制限する必要があります。
| バイアス磁場 Hx (kA/m) |
使用磁場範囲 (kA/m) |
感度 S (mV/V/kA/m) | 最大磁場 Hy、最大 (kA/M) |
備考 |
| 0 | 0.35 | 14 | 0.5 | 前磁化が必要です |
| 1 | 0.5 | 10.5 | 0.5 | 前磁化が必要です |
| 2 | 1.1 | 6.3 | 1 | 前磁化が推奨されます |
| 3 | 1.4 | 4.9 | ∞ | 安定 |
| 5 | 2 | 3.4 | ∞ | 安定 |
表2: 感度および推奨される動作領域.
永久磁石およびバーバー ポール センサ
通常、安定した Hx 磁界は永久磁石によって生成されます。KMY20S または KMZ20S を用いる場合は、お客様が永久磁石を利用して必要なバイアス磁場を生成する必要があります。 KMY20M と KMZ20M には硬質フェライト磁石が内蔵されています。 最大外部磁界強度は、永久磁石材料の安定性によってのみ制限されます。 KMY20M および KMZ20M のタイプの場合は、約 40 kA/m (500 Gauss) を超える外乱磁場によって永久磁石の磁化方向が不可逆的に変わる場合があります。 このことによってオフセット電圧が永続的な変化を引き起こし、センサ機能が破壊される可能性があります。この制限は、S タイプ センサを他の磁石 (希土類磁石など) と組み合せて使用することで緩和できます。ただし、ユーザが用意する必要があります。
温度
オーム抵抗と磁気抵抗はいずれも伝導電子の散乱過程から生じます。あらゆる散乱過程は温度に依存します。したがって、ブリッジ抵抗および MR 効果 ∆R/R も同様に温度依存性を示します。温度係数は、通常、次の式のように 2 つの温度にかかわっています。
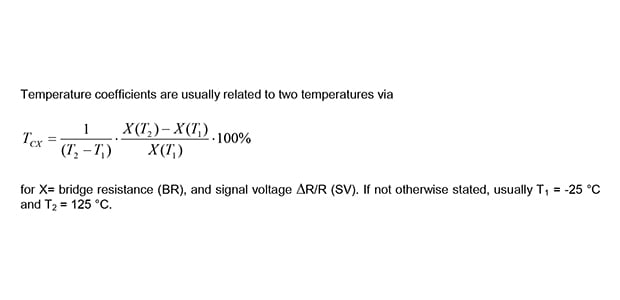
パーマロイの場合は、ブリッジ抵抗および振幅温度係数はいずれもほぼ同じ値ですが sign TCBR≈-TCSV で違いがあります。
この事実から、ユーザは定電流電源を使用することで感度の温度依存を打ち消すことができます。 この場合、温度およびブリッジ抵抗の増加とともに供給電圧が増加します。 この効果によって出力電圧が増加し、感度の損失が打ち消されます。
オフセットの温度係数も重要な値です。この温度係数は、4 つのブリッジ抵抗器の温度挙動のわずかな違いに起因します。 実際には、出力電圧のドリフトが観察されます。これを磁場に起因する通常の出力信号と分離することはできません。 DC 信号結合を使用する用途では、このように測定精度がオフセットの温度係数によって制限されます。
パーマロイは非常に堅牢な材料であり、被覆保護されていれば約 300°C までの非常に高い温度に耐えることができます。 この場合、実装が制約要因になります。
Andreas Voss が、磁気抵抗センサ技術の詳細・センサ技術・センサ技術の応用範囲について、簡単にご説明します。