
ホワイト ペーパー
傾斜センサにおけるセンサの融合
新世代の傾斜センサにおいてセンサの融合が果たす重要な役割について詳しく説明します。
はじめに
傾斜センサは、重力に対する傾斜角度情報を提供します。この情報を使用して機器の状態を監視し、デバイスや車両の特性を制御できます。使用するセンサのタイプは用途に応じて異なります。ハンドヘルド技術においては、安価な表面実装型の傾斜センサがますます主流になっています。これらのセンサは、スマートフォンの自動回転機能を実現するために電話が保持されている角度を測定します。その他に、ゲーム機でも傾斜センサが使用されています。
産業機械、オンロード/オフロード車両、建設機器では、耐久性が強化された傾斜センサが広く使用されています。これらのセンサは、ライド制御、キャビン レベリング、ブーム角度測定、転倒保護などのさまざまな機能に利用されています。一部の車両や建設機器では安全性について追加の要件が定められており、傾斜や勾配をセンサで監視して運転手や周囲の人々の安全を確保することが義務付けられています。
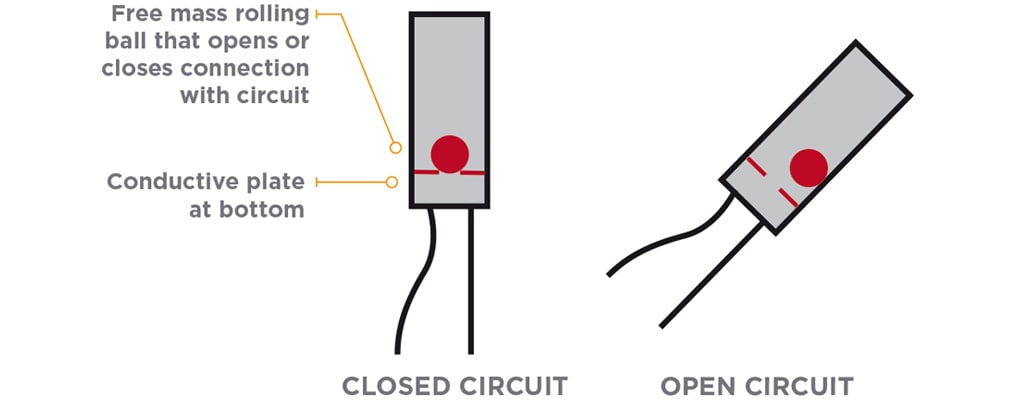
傾斜センサの技術は単純な傾斜スイッチから次第に進化し、現在では複数のセンシング技術を組み合わせた高度なフル電子センサが登場しています。以前は、こうした用途に使われるデバイスはセンサではなく、回転するボールとその下の伝導板で構成されたスイッチでした。このスイッチは、十分な角度に傾斜するとボールが底まで転がって伝導板との電気接続が形成されるように設計されており、その信号がインジケータや何かのオン/オフに使用されていました。
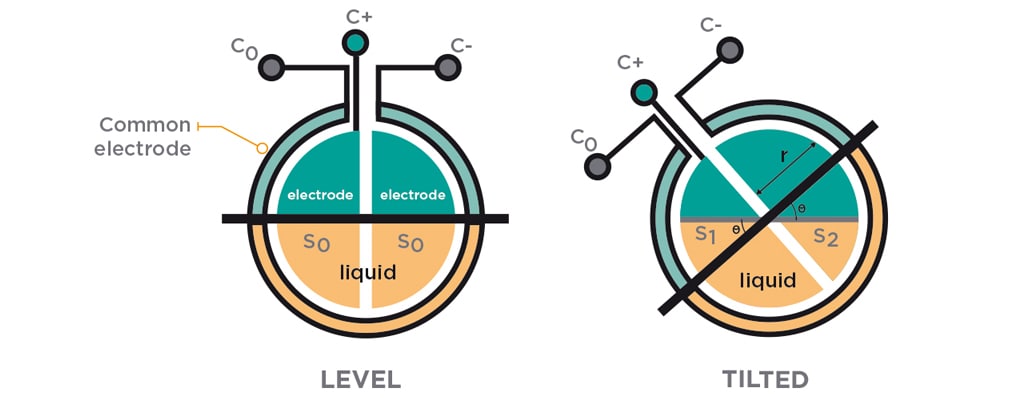
初期の傾斜センサには、密閉された空隙に抵抗性または容量性の液体が封入されていました。カプセルが傾斜すると、液体がどちらかの側に流れて内部回路の抵抗またはキャパシタンスが変化します。その回路の出力を直接監視するか、増幅または他の出力形式に変換していました。このタイプのセンサは多くの用途で正確かつ信頼性の高い傾斜データを提供しましたが、応答時間が遅い、振動やスロッシングの影響を受けやすい、寿命が短いといった欠点がありました。
現代の傾斜センサは一般に、微小電気機械システム (MEMS) 技術を利用しています。
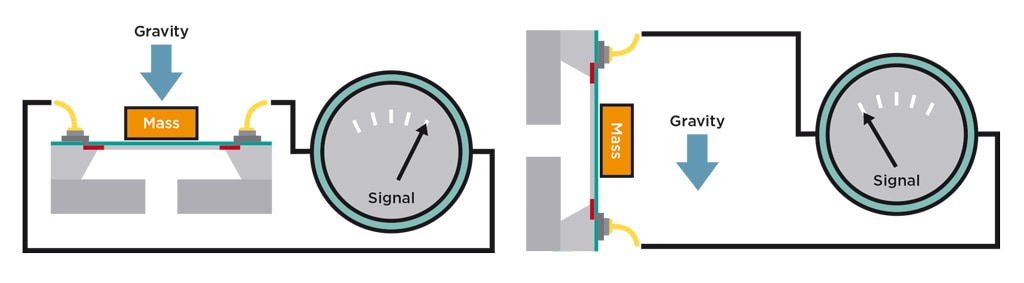
ソリッドステート MEMS は、機械的なサスペンション システムによって基準フレームに取り付けられた可動式のプルーフ マス プレートで構成されている小さなセンサです。これは、機械コンポーネントや電気コンポーネントを 1 つのチップに集積して微小なシステムを作り出す技術です。MEMS ベースの傾斜センサでは、マスがセンサ シリコン ダイに追加されています。水平位置にあるときは、(圧力をかけたときのように) 重力によってダイがたわみ、電気出力が生成されます。ダイが回転して垂直位置になると、ダイにかかる力がゼロになり、電気出力もゼロになります。出力は、傾斜角度 (度単位) を表す 16 ビットの 2 の補数です。MEMS ベースの傾斜センサは、液体ベースの技術が抱える問題の多くを解決しました。
傾斜センサの機能と精度は、多くの要因の影響を受けます。たとえば、重力、温度、傾斜センサの校正、線形性、交差軸感度などの要因が挙げられます。傾斜センサの主な仕様の一部を以下に示します。
- 軸数: 軸数は、用途によって異なる重要な要素です。ロボットでは、2 軸傾斜センサが使用されます。ビデオ ゲームのコントローラやジョイスティックでは、3 軸傾斜センサが必要です。一部のスマートフォンでは、4 軸センサが使用されています。
- 分解能: センサによって検出・出力される最小の傾斜
- 測定範囲: センサが検知する傾斜の範囲。10° しか検知できないセンサもあれば、60°、75°、90° までの範囲に対応するセンサもあります。
- 耐雑音性: 雑音があると、高調波歪みが発生してセンサの機能が損なわれ、出力の変動やシステム効率の低下につながる可能性があります。
- 振動・衝撃: 振動はセンサの機能を混乱させるため、特にオフロード車両や建設現場などの過酷な条件でセンサを使用する場合には、耐振動対策が必須となります。
また、静的 (準静的) 用途と動的用途を区別することも重要です。動的用途では、センサは追加的な加速による影響を受けるのに対し、静的または動きの遅い用途では通常、追加的な加速は無視できます。静的な傾斜センシングにおいて一般に使用されるセンシング技術は、重力に厳格に基づきます。これは、たとえば次のようなものです。
- 加速度計、今日では通常 MEMS タイプ
- 液体封入素子、導電性または非導電性で電子リードアウトを持つ
- ヒーターを備えた対流キャビティ
- エンコーダまたはポテンショメータ付きの振り子
静的な状態とは、車両が停止しているか、一定の速度で一定の方向に動いているか、加速度が非常に低いことを意味します。つまり、その軌道は完全な直線です。たとえば、道路のくぼみやカーブがなく、振動もきわめて小さい状態にあります。
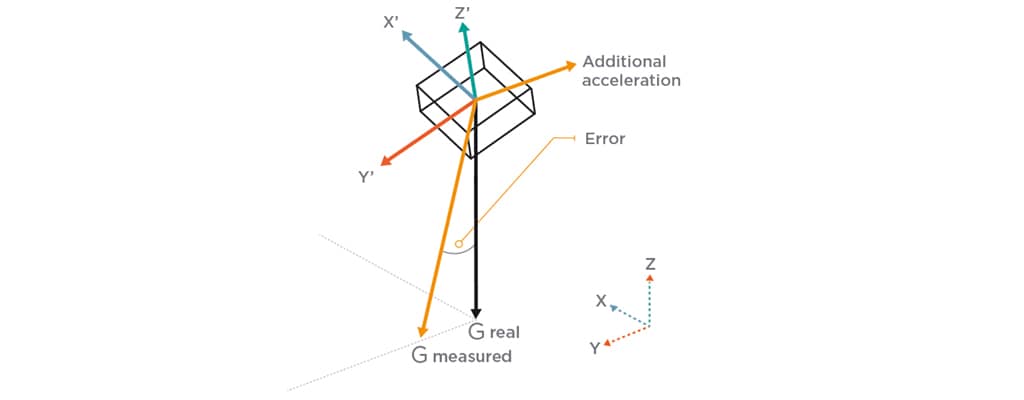
傾斜センサを使用する際にこれがなぜ重要なのでしょうか。MEMS ベースの傾斜センサは、検出素子の作用力として重力を利用します。典型的な MEMS 傾斜センサには 3 軸加速度計が含まれています。そこで傾斜角度に応じて各軸に重力が作用し、出力信号が温度補正されて線形化された後、3D 加速データから実際の傾斜角度が算出されます。ただし、車両速度の変化、道路のくぼみ (衝撃)、カーブなどの追加的な加速が生じると、加速度計がその加速を認識するため、算出される傾斜の歪みにつながります。これは重力に基づくすべてのデバイスに共通しており、大きな誤差を生む可能性があります。
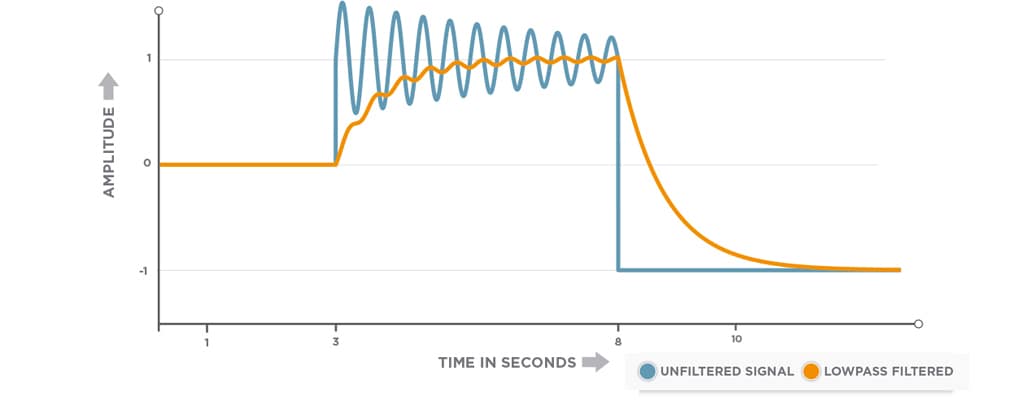
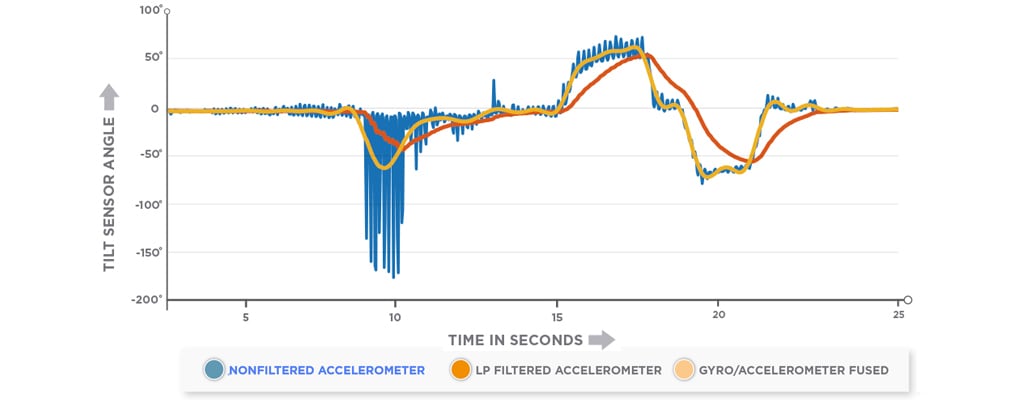
TE Connectivity (TE) の MEMS 傾斜センサは、常温で ±0.15° 以内の高い精度を持ちながら、追加的な加速による誤差を数度以下に抑えます。出力を安定化する一般的な方法は、ロー パス フィルタを適用することです。TE の傾斜センサにはすべてこの仕組みが組み込まれています。適度な振動や衝撃であればロー パス フィルタによって十分に減衰させることができ、多くの用途はこの方法で満足の行く結果が得られます。ロー パス フィルタを使用することの主な欠点は、出力に遅延が生じることと、その性質上、出力が急速な位置の変化に追随できないことです。これは、用途によっては問題となる場合があります。一部の用途では、一方で衝撃や振動によって誘発された誤差のキャンセルが必要となり、他方では車両の真の向きに従った出力が必要となります。純粋に重力に基づくセンサは、その動作方法やフィルタリングまたは補正のタイプにかかわらず、このようなケースには適していません。
センサの融合が鍵となる
センサの融合とは、異なるセンサからの情報を組み合わせて出力信号を計算することを意味します。加速度計とジャイロスコープの組み合わせは強力なアプローチです。一方のセンサの弱点は他方のセンサの強みによって打ち消されます。
ジャイロ センサは、特定の軸の回転速度と角速度を測定します。たとえば航空機では、航空機のロール軸の回転速度を測定するためにジャイロスコープが使用されています。ジャイロスコープは、航空機がローリングしている間は非ゼロ値を測定し、ロールが停止するとゼロを示します。つまり、航空機が 60 度のバンクで協調旋回を行っているとき、ロール ジャイロスコープによって測定される速度は、航空機が水平にまっすぐ飛行しているときと同じようにゼロになります。現在のロール角度はロール速度を経時的に積分することによって概算できますが、必ず誤差が持ち込まれます。また、ジャイロスコープは時間とともにドリフトするため、ある期間にわたって追加の誤差が累積され、結局のところ、水平に対する現在のロール角度は正確にはわからなくなります。したがって、ジャイロセンサだけで航空機、車両、または機器を特定の向きに保つことはできません。そのため、ほとんどの動的な用途では、傾斜の測定とその正確さの評価のために加速度計とジャイロの両方が必要となります。
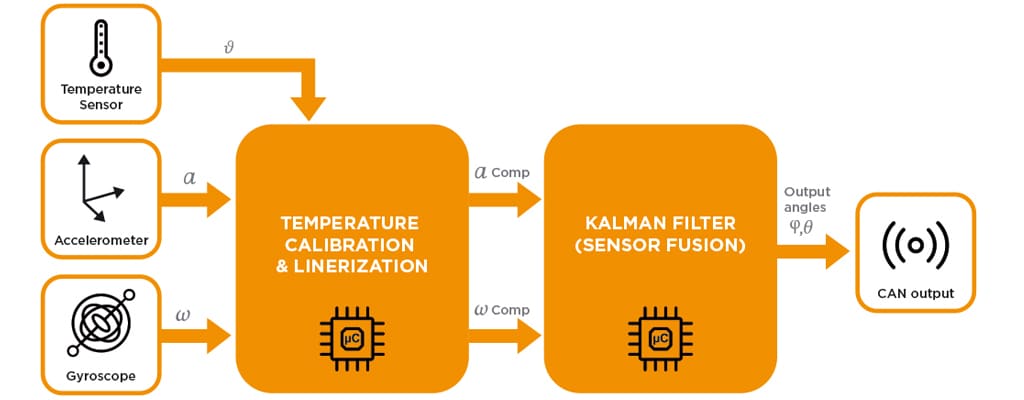
この解決策として TE が開発した AXISENSE-G は、3 軸加速度計、ジャイロスコープ、温度センサ、高度な MCU、CAN バス インタフェースのすべてを堅牢でコンパクトなパッケージに統合したジャイロ安定化傾斜センサです。各種センサからデータを取得して温度の影響を補正し、それらを 1 つに融合して、安定的でありながら速やかに追従する傾斜出力信号を生成します。センサ信号を融合する方法は数通りあります。
Kalman フィルタ
TE の AXISENSE-G 傾斜センサでは、動的な環境下でセンサ データを統合して正確かつ信頼性の高い出力を提供するために、さまざまな分野で広く利用されている Kalman フィルタが組み込まれています。線形二次推定 (LQE) とも呼ばれる Kalman フィルタリングは、ある期間に観測された統計ノイズやその他の不正確さを含む一連の測定値を使用して未知の変数を推定するアルゴリズムです。各タイムフレームの変数の同時確率分布を推定することで、単独の測定に基づく場合よりも精度の高い推定値が得られます。このフィルタの名前は、主要な理論提唱者の 1 人である Rudolf E. Kálmán にちなんで名付けられました。
主な利点
ジャイロスコープを使用して傾斜センサを安定化させることの主な利点は、速度または方向の変化や道路のくぼみ・振動に起因する追加の短期的な加速の悪影響を明らかに低減することです。融合された位置センサについて語るとき、「IMU」(慣性測定装置) という用語が使われることがあります。この用語は通常、ナビゲーションの文脈で使用されており、ナビゲーションには異なる要件が伴うため、TE では IMU という用語は使用していません。
AXISENSE-G 傾斜センサは、短期的な影響を減衰させることに重点を置いています。GPS データなどのグローバルな位置情報を使用する必要がないため、このセンサには、小型で取り付けやすい、使いやすい、堅牢で信頼性が高い、コスト競争力が高いといった特長があります。また、TE の AXISENSE-G 傾斜センサは、ジャイロを備えていない標準の TE 傾斜センサと同じ適合性・形状・機能を持ち、同じ CAN バス通信インタフェースを利用するため、これらのセンサを直接置き換えることができます。
まとめ
傾斜センサの技術は、単純な機械設計から徐々に進化してより高度な液体封入技術が登場し、幅広い角度や複数の軸で正確かつ信頼性の高い傾斜情報を提供できるようになりました。MEMS 技術によって傾斜センサはさらなる進歩と洗練を遂げ、高い精度と分解能を持つソリッドステート設計や、より堅牢で信頼性の高い設計が実現されました。また、フィルタリングと温度補正によって幅広い用途で傾斜センシングの精度が向上し、より動的な用途でも傾斜センサを使用できるようになりました。ただし、従来の傾斜センサは、激しい振動や衝撃を伴う環境では必ずしも十分に機能しません。この問題を解決するため、センサの融合という考えが生まれました。加速度計とジャイロスコープのデータを融合する新世代の傾斜センサは、動的な環境下での反応性はそのままに、状況に応じて発生する追加的な加速の影響をはるかに軽減します。

TE Connectivity (TE) は次世代の傾斜センサを提供しています。MEMS センシング素子を組み合わせたジャイロスコープ補正と高度なフィルタリングを使用することで、動的で過酷な環境にも耐える非常に正確で安定した傾斜センサ出力が得られます。詳しくはこちらの動画をご覧ください。

