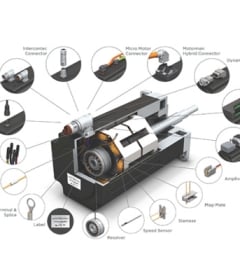
Resolver ermöglichen smarte Motoren
Resolver sind Positionssensoren mit Winkelgenauigkeit, die in Anwendungen wie Servomotoren für Positions- und Geschwindigkeitsrückmeldungen eingesetzt werden können. Die Mechanik besteht aus einem feststehenden Stator und einem beweglichen Rotor. Die Elektrik besteht aus einem Transformator zur Stromversorgung des Rotors sowie einem zweiten Transformator zur Bestimmung der Winkel. Als eines der weltgrößten Unternehmen für Sensoren und Konnektivität bieten wir vibrations- und stoßbeständige industrielle Resolver, die mit einer Vielzahl von Steckverbindern für Servomotoren und weiteren Sensoranwendungen verbunden werden können – speziell für Ihre Anforderungen.
Hohe Zuverlässigkeit und Präzision. Ein präzises und zuverlässiges Motor-Feedback-System gehört zu den wichtigsten Teilen des industriellen Servomotors und der Antriebseinheiten. Unsere zuverlässigen Hochleistungs-Resolver sind als eine kostengünstige, aber unkomplizierte, vielseitige, ordnungsgemäße, effiziente und robuste Lösung für dieses entscheidende System konzipiert. Blättern Sie nach unten, um mehr über unsere industriellen Resolver zu erfahren, die in den Größen 15 und 21 erhältlich sind.
Leistungsmerkmale
- Kontaktfreies Messprinzip
- Beständig gegenüber Feuchtigkeit und vielen Schmiermitteln
- Stoßfest (11 ms Sinus): 1000 m/s2
- Vibrationsbeständig (0 ... 2 kHz): 200 m/s2
- Breiter Temperaturbereich (-55 °C bis 150 °C)
- Niedrige Empfindlichkeit gegenüber elektromagnetischen Interferenzen
- Winkelinformationen über 360°
- Signalübertragung über weite Entfernungen ohne zusätzliche Signalaufbereitung
- Hohe Genauigkeit (typische Winkelgenauigkeit zwischen ± 4‘ und ± 20‘ Bogenminuten je nach Variante)
- Max. zulässige Motordrehzahl 20.000 rpm
- Erhältlich in den Größen 15 und 21 (Durchmesser)
- Erhältlich als Single- und als Multi-Speed (Geschwindigkeit 1 bis 4)

Resolver in Größe 15
Resolver Größe 15 – Kompaktes Design
Unsere Resolver der Größe 15 wurden entwickelt, um anspruchsvollen rauen Umgebungen in Kombination mit geringem Platzbedarf gerecht zu werden. Aufgrund seiner kompakten Bauweise bietet unser Resolver der Größe 15 eine hohe Genauigkeit der Positionsrückmeldung für ein kompaktes Servomotordesign. Darüber hinaus können neben Motorkabelsätzen auch eine Vielzahl kundenspezifischer Lösungen angeboten werden.
Leistungsmerkmale
Resolvergröße 15
- Min. Gehäuselänge: 16,1 mm
- Min. Außendurchmesser: 36,83 mm
- Max. Innenwellendurchmesser: 12,00 mm
- Gewicht: ca. 90 g
- Trägheitsimpuls des Rotors: ca. 20 g · cm2
- Zulässiger radialer Auslauf: 0,075 mm
- Zulässiger Axialversatz: n 0,25 mm
Resolver in Größe 21
ResolverGröße 21 – Mehr Zuverlässigkeit
Unsere Resolver der Größe 21 ermöglichen eine hohe Genauigkeit der Winkelpositionsrückmeldung sowie eine überdurchschnittliche Lebensdauer. Die Resolver der Größe 21 sind mit einer Vielzahl kundenspezifischer Gehäuse- und Wellenlösungen erhältlich, was zu einer reduzierten Montagezeit führt.
Leistungsmerkmale
Resolvergröße 21
- Min. Gehäuselänge: 27,0 mm
- Min. Außendurchmesser: 52,40 mm
- Max. Innenwellendurchmesser: 17,00 mm
- Gewicht: ca. 240 g
- Trägheitsimpuls des Rotors: ca. 200 g · cm2
- Zulässiger radialer Auslauf: 0,075 mm
- Zulässiger Axialversatz: n 0,5 mm
Vorteile
- Zuverlässigkeit und hohe Präzision bei geringen Platzanforderungen
- Auch unter extremen Umgebungsbedingungen vollständig einsatzbereit
- Beständig gegenüber Feuchtigkeit und vielen Schmiermitteln
- Vibrations- und stoßfest
- Überdurchschnittliche Lebensdauer dank der mechanischen Struktur und der automatischen Spulenaufnahme
- Verfügbar in Varianten für Einfach- und Mehrfachdrehungen
- Direkte Verbindung mit Intercontec Steckverbindern von TE
+/-6
Winkelgenauigkeit in Bogenminuten
20000
Maximale Drehzahl in U/min
+150
Maximale Betriebstemperatur in Grad Celsius
Anwendungsbereiche
- Servomotoren
- Robotik
- Fabrikautomatisierungsausrüstung
- Textilwebmaschinen
Häufig gestellte Fragen (FAQs)
Was ist ein Resolver und wie funktioniert er?
Resolver sind Winkelpositionssensoren, die in Anwendungen wie Servomotoren für Positions- und Geschwindigkeitsrückmeldungen eingesetzt werden können. Dank seines Designs bietet der Hohlwellen-Resolver eine deutlich überdurchschnittliche Lebensdauer. Zudem ist er zuverlässig, hoch präzise und benötigt nur wenig Platz. Und auch unter extremen Umgebungsbedingungen bleibt er voll einsatzbereit. Die Mechanik des Resolvers besteht im Wesentlichen aus einem feststehenden Stator und einem beweglichen Rotor.
Die Elektrik besteht aus einem Transformator zur Stromversorgung des Rotors sowie einem zweiten Transformator zur Bestimmung der Winkel. Der erste Transformator hat eine konzentrische Bauweise und ist funktionell unabhängig von Winkelwerten. Der zweite, winkelabhängige Transformator besteht aus einer Statorwicklung und einer Rotorwicklung. Die Wicklungen dieser beiden Transformatorkomponenten sind so ausgelegt, dass die Anzahl der Wicklungen in den Vertiefungen den Werten eines Sinus entspricht.
Negative Werte werden durch Umkehren der Wicklungsrichtung realisiert. Die Statorspulen bestehen aus zwei ähnlichen Wicklungen, die in einer relativen Position zueinander um 90° gedreht angebracht sind. Wenn die Rotorwicklung mit Energie versorgt wird, entsteht ein sinusförmiger magnetischer Fluss, der in Abhängigkeit von der relativen Winkelposition des Rotors und des Stators Spannungen in den Statorspulen induziert. Die Amplituden der beiden Spannungen entsprechen dem Sinus oder Kosinus. So ist es mit Hilfe eines geeigneten Auswertekreises möglich, die absoluten Winkeldaten (Sinus ϕ / Kosinus ϕ = Tan ϕ, wobei ϕ dem Wellenwinkel entspricht) zu erhalten. Der für die Basisversion verwendete Begriff ist ein Resolver mit einem Polpaar (1-Gang-Resolver).
Die Anzahl der Polpaare gibt an, wie oft die Sinusverteilung der Rotor- und Statorwicklungen während einer Umdrehung wiederholt wird. Je höher die Anzahl der Polpaare, desto höher die mechanische Präzision des Resolvers. Bei mehreren Polpaaren können die absoluten Winkeldaten verloren gehen, aber nach der digitalen Konvertierung der Resolver-Signale ist eine höhere Auflösung möglich.
Was ist der Unterschied zwischen einem Resolver und einem Encoder?
Beide Geräte (Resolver und Encoder) sind Winkelpositionssensoren, d.h. durch Umwandlung der mechanischen Bewegung in elektrische Signale messen sie die Drehposition einer Welle. Resolver sind gegenüber extremen Umgebungsbedingungen wie hohen Temperaturen sowie Stößen und Vibrationen im Vergleich zu Encodern wesentlich robuster. Resolver können als Alternative zu Inkremental- und Absolutwertgebern (Encoder) dienen. Encoder liefern ein digitales Ausgangssignal, während Resolver ein analoges Ausgangssignal bereitstellen, wodurch eine Resolver-zu-Digital-Konvertierung erforderlich ist. Die Entscheidung zwischen der Auswahl eines Resolvers und eines Encoders hängt von der spezifischen Anwendung ab, insbesondere von den Umgebungsbedingungen und von der Steuerelektronik. Resolver eignen sich besser für sehr raue Umgebungen, Encoder hingegen weisen eine hohe Genauigkeit auf und sind weniger komplex, wenn es darum geht, sie in die Steuerelektronik zu integrieren.