
Whitepaper
Zukunft unbemannter Systeme
Das marine Umfeld stellt einzigartige Herausforderungen – Druck, Überflutung, Korrosion – an die zuverlässige Versorgung von UUVs und USVs. Lösungen von TE Connectivity stellen sich diesen Herausforderungen.
Autor:
Gregory Powers, vormals Market Development Manager, Global Aerospace, Defense, and Marine. Gregory Powers ist nicht mehr für TE tätig.
Das Feld „Robotik“ deckt alle dem Menschen bekannten Umgebungen ab: Meer, Land, Luft und Weltraum. Bei unbemannten Systemen denken viele an unbemannte Luftfahrzeuge (UAVs, Unmanned Aerial Vehicles) oder gar an Raumsonden und Rover auf fernen Planeten. Jenseits der UAVs gibt es jedoch auch unbemannte Unterwasserfahrzeuge (UUVs, Unmanned Underwater Vehicles) und unbemannte Oberflächenfahrzeuge (USVs, Unmanned Surface Vessels), die im Kontext von Sicherheit und Verteidigung zunehmend in die öffentliche Wahrnehmung geraten. Unbemannte Bodenfahrzeuge (UGVs, Unmanned Ground Vehicles) rücken heute gleichermaßen ins Rampenlicht. Die US-Marine experimentiert sogar mit einem humanoiden Roboter (SAFFiR), der als Ersthelfer bei der Brandbekämpfung auf Schiffen eingesetzt werden soll.
Die meisten UAVs setzen leichtgewichtige Datenübertragungsvorrichtungen ein, und typischerweise operieren sie in einer hindernisfreien Umgebung, die eine problemlose Kommunikation mit Empfangsstationen zulässt.
Jedes dieser unbemannten Systeme ist für den Betrieb in einer Umgebung und einem Ökosystem vorgesehen, in der/dem eine Maschine einen Menschen unterstützen oder gar ersetzen kann. Beweggründe hierfür können beispielsweise Sicherheitsbedürfnisse, Umweltschutzerwägungen, technologische Überlegenheit oder Kosten sein. Die Aussendung eines unbemannten Fahrzeugs statt eines Menschen kann weniger gefährlich und weniger kostenaufwändig sein. Die Anforderungen der Anwendung bestimmen die Technologie der für die Konstruktion solcher Roboter eingesetzten elektromechanischen Grundbausteine, und einfachste wie hochkomplexe Lösungen sind gleichermaßen anzutreffen. Jede Mission geht mit außerordentlichen technologischen und ökonomischen Paradigmen einher, die Ingenieure zur Auswahl spezifischer Konnektivitätslösungen veranlassen.
UAVs – SWAP und Bandbreite
Ob von der Schulter oder von einem Träger aus gestartet – bei UAVs dreht sich alles um SWAP (Größe, Gewicht, Leistung) und Bandbreite. Eine leichtgewichtige Konstruktion (nicht zuletzt der Konnektivitätslösungen) ist für die Maximierung der Nutzlast, der Reichweise und der Einsatzzeit unabdingbar. Überwachungs- und vergleichbare Anwendungen erfordern eine Hochgeschwindigkeitssignalverarbeitung, doch ist die Bereitstellung von Übertragungsbandbreite bei UAVs weniger aufwändig als bei anderen unbemannten Fahrzeugen. Die meisten UAVs setzen leichtgewichtige Datenübertragungsvorrichtungen ein, und typischerweise operieren sie in einer hindernisfreien Umgebung, die eine problemlose Kommunikation mit Empfangsstationen zulässt. Bedingt durch ihr Umfeld profitieren UAVs von leichtgewichtigen Energieverteilungsvorrichtungen hoher Kapazität. Kabel und Kabelbaumkomponenten haben im Laufe der Jahre beständig an Gewicht verloren. Vernetzte Isolations- und Mantelmaterialien ermöglichen signifikant geringere Wanddicken, was gleichermaßen Platz und Gewicht spart. Da jedes Gramm zählt, brachte TE Connectivity (TE) unlängst leichtgewichtige Wärmeschrumpfmuffen auf den Markt, die um bis zu 20 % leichter sind als die Teile, die sie ersetzen können. In vielen Fällen wurden Glasfaserverbindungen – Paradebeispiel für geringes Gewicht, hohe Bandbreite und EMI-Immunität – implementiert.
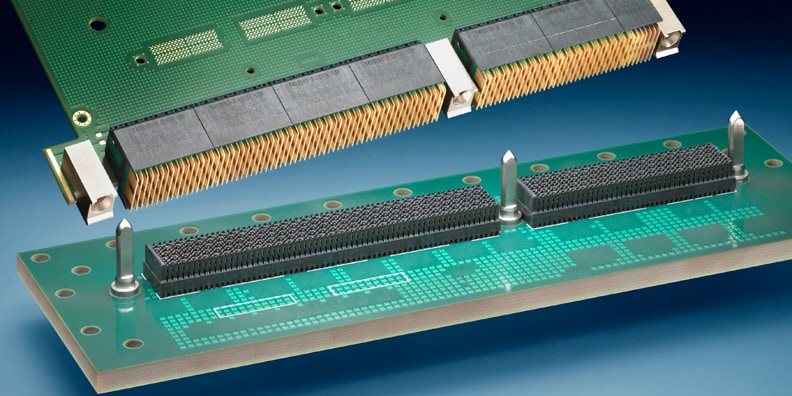
Die lokale Verarbeitung von Bild- und Signalinformationen ermöglicht dem UAV das Sieben und Priorisieren von an die Empfangsstation zu übertragenden Daten. Mit ausgeklügelter Verarbeitung wächst der Bedarf an eingebetteter Hochgeschwindigkeitsdatenverarbeitung. Der VITA 46 VPX Standard MULTIGIG RT 2-R Backplane-Steckverbinder von TE (Abbildung 1) ist für diese Aufgabe prädestiniert. Modularität und Skalierbarkeit verleihen diesem VPX-Steckverbinder in offener Architektur Flexibilität in der Anwendung, die erwiesenermaßen Datenraten von mehr als 10 Gb/s für ausgezeichnete Funktionsdichte unterstützt. UAV-Entwickler profitieren zudem von Fortschritten auf dem Gebiet der Verbundwerkstoffe und selektiver Metallisierung für die Realisierung integrierter Verbundgehäuse und Antennen.
UGVs – Robust und kostenbewusst
Bei der Entwicklung von UGVs standen seit jeher Kosteneinsparungen im Vordergrund. Begründet ist dies unter anderem in der potenziell hohen Zahl produzierter Einheiten, der weniger anspruchsvollen Natur der Anwendungsumgebung (Boden) und dem Fakt, dass UGVs oftmals als Verbrauchsgüter angesehen werden. Dessen ungeachtet erwartet man von UGVs Robustheit und Einsatzbereitschaft, was die Entwickler auf den schmalen Grat zwischen Kosten und Leistung zwingt. Die Bandbreite heutiger UGVs reicht von kleinen, preiswerten Rovern mit einer Kamera oder einem anderen Sensor bis hin zu vielseitigen Multifunktionssystemen. Analog zur Bandbreite dieser Plattformen rangieren die Konnektivitätslösungen von gewerblichen, industriellen oder der Automobilindustrie entlehnten Steckverbindern bis hin zu MIL-SPEC-Produkten. So oder so müssen Konnektivitätslösungen der Anwendung entsprechend ausgelegt werden.
Fahrzeuge wie der HMMWV (High Mobility Multipurpose Wheeled Vehicle, auch bekannt als Humvee) und LKWs für die logistische Unterstützung werden für den Betrieb im bemannten oder unbemannten Modus konzipiert.
Letztlich handelt es sich um vergleichsweise einfache und preiswerte Systeme, deren Verlust nicht sonderlich schmerzt. Fahrzeuge wie der HMMWV (High Mobility Multipurpose Wheeled Vehicle, auch bekannt als Humvee) und LKWs für die logistische Unterstützung werden für den Betrieb im bemannten oder unbemannten Modus konzipiert. Sie können witterungsbeständige Steckverbinder aus der Automobilindustrie, IP67-I/O-Steckverbinder, Rundsteckverbinder für militärische Anwendungen oder aus diesen abgeleitete Rundsteckverbinder nutzen. MIL-DTL-38999-Steckverbinder und ihre nahen Verwandten zählen nach wie vor zu den bevorzugten Produkten für robuste Verbindungen. Nicht nur uneingeschränkt für militärische Anwendungen freigegebene Steckverbinder, auch eine Vielzahl anderer Steckverbinder nutzt das vertraute 38999-Gehäuse als Formfaktor. Die neue Generation COTS-Rundsteckverbinder im Stil von Steckverbindern für militärische Anwendungen eignen sich ideal für UGVs. So basieren beispielsweise die Wildcat Micro und die 38999-Steckverbindern auf der bewährten Rundsteckverbinderkonstruktion für militärische Anwendungen. Der Bajonettmechanismus des Wildcat Micro Steckverbinders, der 3 bis 9 Kontakte aufnehmen kann, ist ausgesprochen robust und ermöglicht ein schnelles und positives Koppeln. Optional ist eine vibrationsbeständige Schraubkupplung mit Dreifachabschluss ebenso verfügbar wie verschiedene Montageoptionen und Rückseitenzubehör.

Die auf der MIL-DTL-38999-Technologie basierenden Wildcat 38999-Steckverbinder sind in vier Gehäusegrößen mit 11 bis 64 Kontakten verfügbar und weisen eine gegenüber herkömmlichen 38999-Steckverbindern nahezu verdoppelte Kontaktdichte auf. Die Schraubkupplung mit Dreifachabschluss ermöglicht eine robuste, hochgradig zuverlässige Kopplung, die starken Stößen und Vibrationen widersteht; die Steckverbinder sind – wie für den Betrieb unter allen Witterungsbedingungen oder ein potenzielles Untertauchen während des Einsatzes unerlässlich – vollständig abgedichtet. Viele für den Einsatz in unbemannten Systemen vorgesehene Sensorsysteme benötigen jedoch nicht nur Robustheit und hohe Kontaktdichte, sondern auch Bandbreite. Die CeeLok FAS-X Steckverbinder von TE unterstützen 10-Gb/s-Ethernet in 38999-Gehäusen, wobei ein Gehäuse der Größe 11 einen und ein Gehäuse der Größe 25 vier Ethernet-Kanäle aufnehmen kann. Ein Vorteil der an 38999 angelehnten Steckverbinder ist, dass sie dieselben, marktgängigen Steckerendgehäuse und andere Zubehörteile nutzen können.
UUVs – Anspruchsvolle Umgebung
Das marine Umfeld stellt einzigartige Herausforderungen insbesondere hinsichtlich des Widerstandsvermögens gegen die unter Wasser herrschenden Drücke, den Betrieb in einer überfluteten Umgebung und den Schutz gegen salzinduzierte Korrosion. Elektronische Baugruppen sind oftmals in Sicherheitsbehältern oder Line-Replaceable Units (LRUs) untergebracht. Bedingt durch hydrodynamische Effekte weisen UUVs, die mit einer relevanten Vorwärtsgeschwindigkeit operieren sollen, oftmals nur einen minimalen Frontquerschnitt auf oder sind gar torpedoförmig, so dass das Thema Platz stets mit an erster Stelle steht. Die verschiedenen Anforderungen – Betrieb unter Wasser, geringer Platzbedarf, geringes Gewicht, hohe Kontaktdichte – sind oft nur schwer unter einen Hut zu bringen. Angesichts der resultierenden Anforderungen an Packungsdichte, kleinen Formfaktor und robuste Steckverbindungen empfehlen sich die Trockensteckverbinder SEACON MINI-CON von TE für den UUV-Einsatz. Die SEACON MINI-CON Steckverbinder von TE wurden in Hinblick auf kleinen Durchmesser, hohe Dichte und hohe Druckbeständigkeit entwickelt, und sind in 13 Gehäusegrößen und mit bis zu 203 Kontakten verfügbar Der Standard-Steckverbinder widersteht 16.000 psi, Ausführungen für höhere Drücke sind ebenfalls lieferbar.

Nass steckbare Steckverbinder sind von Natur aus größer, da sie sowohl einen Druckausgleich als auch einen Mechanismus für das Abdichten der nicht gesteckten Steckverbinderkontakte benötigen. Zudem benötigen sie eine großzügig bemessene Zuleitung, um im Unterwasserbetrieb ein einwandfreies roboterisiertes Stecken der Steckverbinderhälften durch ein UUV zu ermöglichen. Nass steckbare Steckverbinder werden seit jeher bei der Unterwasserölförderung eingesetzt, sind aber auch in marinen Anwendungen wie Unterwasser-Dockingsystemen für UUVs anzutreffen. Nach wie vor besteht Bedarf an der Entwicklung autonomer Unterwasserfahrzeuge. Die in der Öl- und Gasförderung eingesetzten ferngesteuerten Fahrzeuge werden direkt über ein langes Versorgungskabel gesteuert, das Energie-, Steuerungs- und Datenleitungen vereint. Energie- und Glasfaserleitungen im Versorgungskabel bieten adäquate Leistungszufuhr und Bandbreite. Die eingeschränkte Reichweite, Bewegungsfreiheit und Tarnmöglichkeiten kabelgebundener ferngesteuerter Fahrzeuge (ROVs) können sich bei Rüstungsanwendungen als problematisch erweisen.
Jedem Umfeld – Meer, Land, Luft und Weltraum – wohnen eigene Hürden inne, die sich maßgeblich auf die Konstruktion des unbemannten Systems auswirken.
Der kabelungebundene, autonome Betrieb stellt die Entwickler vor andere, ganz eigene Probleme wie Kommunikation und Stromversorgung. Ein unter Wasser operierendes Fahrzeug kann nicht auf die komfortablen drahtlosen Kommunikationsoptionen eines UAV oder UGV zurückgreifen. Wasser eignet sich ausgesprochen schlecht für die Übertragung von HF-Signalen. Zwar gestatten akustische Systeme oder Niederfrequenz-Schleppantennen ein gewisses Maß an Kommunikation, für einen größeren Datendurchsatz mangelt es ihnen jedoch an Effizienz. Eine übliche Anwendung für akustische Signalsysteme besteht einfach darin, das UUV anzuweisen, aufzutauchen und Daten zu senden oder zu empfangen. Einmal aufgetaucht kann das UUV mühelos mit in der Nähe befindlichen Wasserfahrzeugen oder über Satellit kommunizieren. Diese Kommunikationsprobleme haben zur Folge, dass viele UUVs keine intensive On-Board-Signalverarbeitung betreiben. Anders als bei UAVs, bei denen oftmals aufwändige Signalverarbeitungssysteme für die Generierung hochauflösender Fotos und Videos anzutreffen sind, nehmen sich die diesbezüglichen Bedürfnisse von UUVs bescheidener aus. Wenn der eingebettete Computer gut gegen Wasser und Druck geschützt ist, ist seine Betriebsumgebung vergleichsweise „gutartig“ – ohne die Stöße und Vibrationen, denen sich UAVs und UGVs ausgesetzt sehen. Eingebettete EDV-Systeme von der Stange (COTS) bieten die erforderliche Rechenleistung und weisen die benötigte mechanische Stabilität und Widerstandsfähigkeit gegen Umgebungseinflüsse auf. Für den Übergang von der geschützten Umgebung zum Rest des UUV bedarf es abgedichteter Steckverbinder. Die Stromversorgung von UUVs basiert typischerweise auf Batterien. Die neuesten Batterietechnologien, effiziente Leistungsverteilung und Systeme mit geringem Stromverbrauch sind für Reichweise und Erfolg der Mission entscheidend. Die Minimierung von Größe, Gewicht und Leistungsbedarf ist ein häufiges Thema beim Design unbemannter Systeme.
Unbemannte Welt
Mit dem Fortschreiten der Sensor-, Software- und Verarbeitungs-Technologien unterliegen auch die Effektivität und die Präsenz unbemannter Robotersysteme kontinuierlicher Fortentwicklung. Was sich jedoch nicht ändern wird, sind die Umgebungsbedingungen und die aus diesen resultierenden Herausforderungen, denen sich Robotersysteme zu stellen haben. Jedem Umfeld – Meer, Land, Luft und Weltraum – wohnen eigene Hürden inne, die sich maßgeblich auf die Konstruktion des unbemannten Systems auswirken. Diese Herausforderungen rangieren von den allereinfachsten (beispielsweise Materialauswahl) bis hin zu den komplexesten (beispielsweise der erforderliche Grad an Autonomie). Die Rolle der Konnektivität und der Bereich der für den Designer verfügbaren Lösungen werden auf vergleichbare Weise durch die Betriebsumgebung des unbemannten Systems beeinflusst. Da Form und Funktion bei Verbindungslösungen zusammenfließen, wird die Rolle der Konnektivität in der Zukunft des Designs unbemannter Systeme weiter an Bedeutung zunehmen.