Produto de Orientação por Visão personalizado e escalável
RESUMO
Este documento ilustra um produto de Orientação por Visão repetível, escalável, acessível e fácil de usar para usuários de todos os níveis. A Orientação por Visão, que significa orientar a unidade executável até a posição desejada para realizar a ação necessária, é amplamente utilizada na aplicação de fabricação de automação industrial. Nosso produto repetível é um produto padrão, que desenvolvemos uma vez, e não há necessidade de o cliente desenvolvê-lo. O componente crítico para o produto de Orientação por Visão é o algoritmo de visão da máquina. Nosso produto acessível fornece o algoritmo de visão de máquina personalizado e totalmente autoinovado, sem a compra de nenhum produto comercial no mercado, o que reduz consideravelmente o custo do produto de visão da máquina. Enquanto isso, o desempenho da nossa plataforma de visão de máquina é competitivo com o produto comercial no mercado. Nosso produto escalável é capaz de satisfazer diferentes aplicações de Orientação por Visão de acordo com as necessidades dos clientes. Nosso produto fácil de usar funciona como a câmera inteligente com boa usabilidade, os usuários podem implantar a aplicação de Orientação por Visão rapidamente apenas arrastando e clicando no mouse. Validamos nosso produto realizando Orientação por Visão com vários tipos de robôs industriais, como o robô UR e o robô EPSON, e os resultados dos testes foram bons.
DECLARAÇÃO DO PROBLEMA
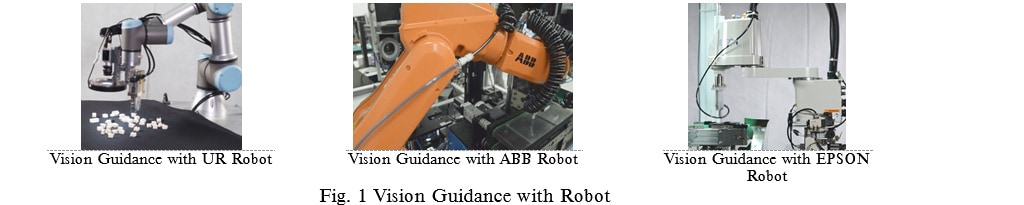
A Orientação por Visão é uma das aplicações mais populares para a visão de máquinas na fabricação de automação industrial. Teoricamente, a Orientação por Visão significa orientar a unidade executável até a posição desejada para realizar as ações necessárias. As unidades executáveis incluem robô, cilindro, motor etc. As ações necessárias incluem pegar e posicionar, soldar, montar, e assim por diante. Conforme mostrado na Fig. 1, robôs com Orientação por Visão são muito populares na automação. Como montar o olho no robô, a Orientação por Visão aumenta muito a precisão do movimento do robô e amplia os campos de aplicação.
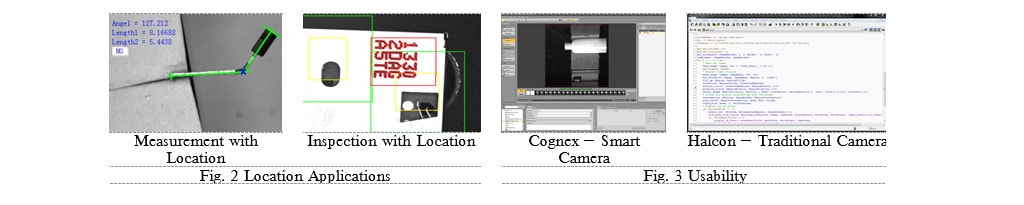
Para executar a aplicação de Orientação por Visão, existem várias tecnologias necessárias de visão de máquina: a) localização do objeto, b) calibração, c) comunicação. Essas tecnologias de Orientação por Visão também são amplamente utilizadas nos campos industriais. Conforme mostrado na Fig. 2, usaremos a tecnologia de localização do objeto na aplicação de inspeção, pois antes de realizar a inspeção, normalmente precisamos localizar a posição do objeto através do algoritmo de localização do objeto. Usamos também a localização do objeto na aplicação de medição dimensional pelo mesmo motivo. Assim, a Orientação por Visão é a tecnologia de visão industrial mais utilizada.
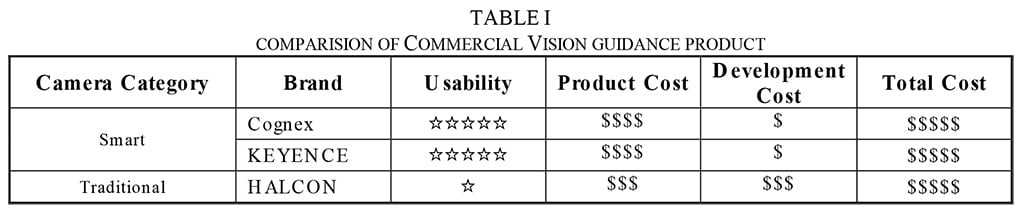
Existem vários produtos comerciais disponíveis no mercado para realizar Orientação por Visão, que podem ser categorizados em dois grupos: produto baseado na câmera inteligente e produto baseado na câmera tradicional. Os representantes da câmera inteligente são Cognex e Halcon. O representante da câmera tradicional é a Halcon. Na Tabela 1, listamos o custo para usar esse tipo de produto de visão de máquina. A câmera inteligente tem a boa usabilidade, alto custo do produto, baixo custo de desenvolvimento. A câmera tradicional tem usabilidade ruim, baixo custo do produto e alto custo de desenvolvimento. Na Fig. 3, podemos ver que o uso da câmera inteligente se dá principalmente através do mouse, arrastando e clicando. Para a câmera tradicional precisamos do engenheiro profissional para realizar a programação avançada. Assim, o custo total para ambos os tipos de produtos são altos. Também para câmera inteligente e para câmera tradicional, se quisermos usar a função de Orientação por Visão, precisamos comprar todos os pacotes de algoritmos, uma das razões para o alto custo.
É preciso usar um produto de Orientação por Visão personalizado para preencher a lacuna entre a necessidade do cliente e os produtos comerciais no mercado. Existem vários desafios ao desenvolvimento:
- Algoritmo de visão de máquina autoinovado: a razão para o alto custo do produto de Orientação por Visão comercial é o algoritmo de visão da máquina. Para reduzir o custo do sistema, não podemos comprar nenhuma biblioteca de visão de máquina comercial; é preciso desenvolvermos o algoritmo nós mesmos, já que as inovações geram a competência central para o nosso produto
- Baixo custo com desempenho competitivo: o cliente não aceitará um produto se o desempenho for ruim, mesmo que a baixo custo; então, nosso algoritmo de visão de máquina autoinovado deve ter desempenho competitivo em comparação com o produto comercial
- Configurável para diferentes tipos de aplicação de orientação: precisamos orientar diferentes tipos de unidades executáveis, como o robô SCARA, o robô de 6 eixos, cilindro, motor, e assim por diante; por isso precisamos de um sistema configurável, de forma que o usuário possa configurar o produto de acordo com a exigência das diferentes aplicações
- Uso amigável para os operadores: o produto deve ter a usabilidade similar à da câmera inteligente
- Qualidade de nível industrial para operação na linha de produção: o baixo custo não deve degradar a qualidade do produto
- Ser compatível com a fábrica digital: a fábrica digital é importante para a TE e muitos clientes estão interessados nela; por isso, devemos considerar o potencial de conectar-se à rede e trocar informações
Inovamos na solução configurável e personalizada de Orientação por Visão. Desenvolvemos todo o algoritmo de visão da máquina para Orientação por Visão por nossa própria conta e não compramos nenhum produto comercial disponível no mercado, o que reduz muito o custo do sistema. O desempenho do nosso sistema é comparável ao do produto comercial. Fornecemos o produto configurável que pode ser configurado para diferentes aplicações. Nossa solução tem o método de operação semelhante ao da câmera inteligente, o usuário pode conferir o software apenas arrastando e clicando com o mouse para realizar uma aplicação de Orientação por Visão. Validamos nosso produto realizando Orientação por Visão com vários tipos de robôs industriais, como o robô UR e o robô EPSON, e os resultados dos testes foram bons. Comparando o custo do produto comercial, a economia de custos por um conjunto é de cerca de US$ 5.000; e considerando que há mais de 200 potenciais oportunidades de implantação, a economia de custos para a tecnologia é superior a US$ 1 milhão.
MÉTODOS E RESULTADOS
Produto de Orientação por Visão AMT
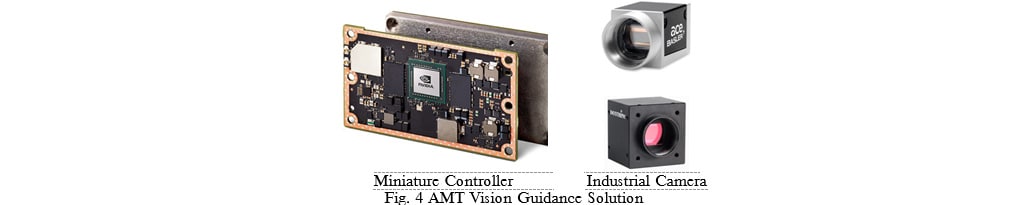
Nosso produto fornece toda a solução para aplicações de Orientação por Visão. Conforme mostrado na Fig. 4, nosso pacote de produtos inclui o software, o controlador em miniatura e a câmera industrial de 2 megapixels. A câmera é usada para capturar a imagem, o software pode processar a imagem e realimentar o resultado processado, o controlador em miniatura é capaz de executar o software como o host.
O software é a chave para todo o sistema — ele não só está integrado com os algoritmos personalizados de visão da máquina como também permite operação configurável pelos usuários. Para o cliente ter a solução completa, também fornecemos a câmera e o controlador. O cliente não precisa gastar tempo na seleção de câmeras e seleção de host.
A estrutura e as funções do software
Desenvolver um software configurável é um projeto complexo. Por isso, em primeiro lugar, construímos a estrutura conceitual do software, como mostrado na Fig. 5. Com três camadas, cada uma delas serve apenas à camada acima de si e é servida pela camada abaixo dela. Os módulos de função são caracterizados em cada camada. Para melhorar a robustez de cada camada, o módulo de função em cada camada também é responsável por lidar com erros relacionados ao módulo de função.
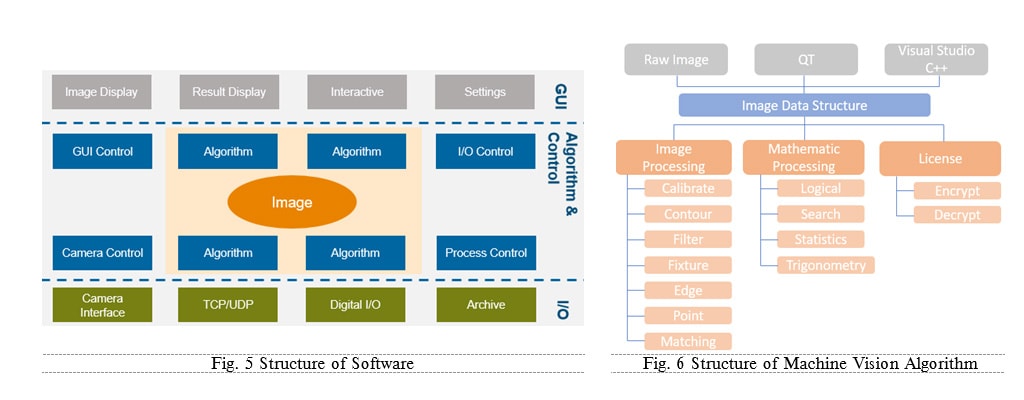
A parte inferior é a camada de Entrada/Saída (E/S), que é responsável pela comunicação entre o software e o ambiente. Ela tem quatro módulos de função. O módulo de interface da câmera é usado para acionar a câmera, capturar imagens e ler/definir os parâmetros da câmera. O módulo TCP/UDP implementa os protocolos TCP e UDP, que permitem a comunicação com o dispositivo que tenha suporte para o protocolo TCP/UDP. Neste momento, quase todos os robôs industriais oferecem suporte ao protocolo TCP/UDP. O módulo de E/S digital permite a comunicação através da E/S digital tradicional. O módulo de arquivo é usado para arquivar as informações, como imagens, o registro do sistema, a receita de programação, o resultado da inspeção.
No meio está a camada de algoritmo e controle, que recebe imagens da camada de E/S, executa o processamento e a realimentação necessários para a camada de E/S e a camada de GUI. Além disso, essa camada é responsável pelo controle lógico de todo o software para agendar as tarefas complexas entre cada camada.
A camada superior é a camada GUI, que é usada para exibição de imagens e resultados. O usuário também pode ajustar a configuração do software por operações interativas.
A estrutura e as funções da biblioteca de visão de máquina
Na camada de algoritmo e controle, há uma biblioteca de algoritmos de visão de máquina autodesenvolvidos. A estrutura e a função da biblioteca são mostradas na Fig. 6. Duas funções principais da biblioteca de visão da máquina são como representar os dados da imagem e como processar a imagem.
A representação da imagem da biblioteca influencia a eficiência de leitura/gravação de dados da imagem na memória física do computador, por isso influencia muito a eficiência do algoritmo de visão da máquina. Por exemplo, para uma imagem de 2 megapixels, quando o sistema quiser ler os dados da imagem, o algoritmo executará a operação de leitura de pixels 2 milhões de vezes. Normalmente, cada algoritmo lerá os dados da imagem várias vezes; se a representação da imagem for ruim, a eficiência do algoritmo será muito reduzida. Quando testada em relação a nossa representação de imagem, a velocidade de uma boa representação é pelo menos 3 vezes mais rápida do que a de uma má representação.
Os dados de imagem da camada de E/S não têm a representação de imagem que definimos. Normalmente, existem três tipos de formatos de dados das camadas de E/S: dados de imagem bruta da câmera, do formato QT (Qimage) e do formato Visual Studio C++ (Cimage). Então, nós fornecemos especialmente o algoritmo de conversão de formato para converter os dados de imagem de entrada para a representação de imagem específica.
Sobre o algoritmo de processamento de imagens, a biblioteca de processamento de imagens fornece três módulos principais de função: 1) processamento de imagem, 2) processamento matemático e 3) licença
1. Processamento de imagem: módulo que tem o algoritmo de visão de máquina personalizado; dentro dele, os algoritmos de Orientação por Visão são reunidos em vários subgrupos. Cada subgrupo é responsável por cada tipo de algoritmo de processamento de imagens. Por exemplo, o subgrupo de localização de objeto fornece os algoritmos sobre correspondência de modelos, o subgrupo de calibração fornece os algoritmos sobre a função de calibração etc.
2. Processamento matemático: a operação matemática é a base para o algoritmo de processamento de imagens, que é frequentemente usado na biblioteca. Assim, realizamos nosso algoritmo de visão de máquina de alta eficiência dentro da biblioteca de visão de máquina. Este módulo conta com quatro subgrupos, como o subgrupo de Trigonometria, que fornece o algoritmo para calcular os valores trigonométricos. O subgrupo de Pesquisa fornece vários tipos de algoritmos de pesquisa
3. Licença: o algoritmo autoinovado é de propriedade da TE; por isso, fornecemos especialmente a função de criptografar e descriptografar para controlar a autorização do produto
Discussão e pontos-chave
Este documento ilustra um produto de Orientação por Visão repetível, escalável, acessível e fácil de usar para usuários de todos os níveis. Validamos nosso produto realizando Orientação por Visão com vários tipos de robôs industriais, como o robô UR e o robô EPSON, e os resultados dos testes foram bons.
AGRADECIMENTOS
Somos sinceramente gratos ao Sr. Josef Sinder, que compartilhou muita informação e tecnologia sobre o sistema integrado de visão da máquina.
Produto de Orientação por Visão personalizado e escalável
RESUMO
Este documento ilustra um produto de Orientação por Visão repetível, escalável, acessível e fácil de usar para usuários de todos os níveis. A Orientação por Visão, que significa orientar a unidade executável até a posição desejada para realizar a ação necessária, é amplamente utilizada na aplicação de fabricação de automação industrial. Nosso produto repetível é um produto padrão, que desenvolvemos uma vez, e não há necessidade de o cliente desenvolvê-lo. O componente crítico para o produto de Orientação por Visão é o algoritmo de visão da máquina. Nosso produto acessível fornece o algoritmo de visão de máquina personalizado e totalmente autoinovado, sem a compra de nenhum produto comercial no mercado, o que reduz consideravelmente o custo do produto de visão da máquina. Enquanto isso, o desempenho da nossa plataforma de visão de máquina é competitivo com o produto comercial no mercado. Nosso produto escalável é capaz de satisfazer diferentes aplicações de Orientação por Visão de acordo com as necessidades dos clientes. Nosso produto fácil de usar funciona como a câmera inteligente com boa usabilidade, os usuários podem implantar a aplicação de Orientação por Visão rapidamente apenas arrastando e clicando no mouse. Validamos nosso produto realizando Orientação por Visão com vários tipos de robôs industriais, como o robô UR e o robô EPSON, e os resultados dos testes foram bons.
DECLARAÇÃO DO PROBLEMA
A Orientação por Visão é uma das aplicações mais populares para a visão de máquinas na fabricação de automação industrial. Teoricamente, a Orientação por Visão significa orientar a unidade executável até a posição desejada para realizar as ações necessárias. As unidades executáveis incluem robô, cilindro, motor etc. As ações necessárias incluem pegar e posicionar, soldar, montar, e assim por diante. Conforme mostrado na Fig. 1, robôs com Orientação por Visão são muito populares na automação. Como montar o olho no robô, a Orientação por Visão aumenta muito a precisão do movimento do robô e amplia os campos de aplicação.
Para executar a aplicação de Orientação por Visão, existem várias tecnologias necessárias de visão de máquina: a) localização do objeto, b) calibração, c) comunicação. Essas tecnologias de Orientação por Visão também são amplamente utilizadas nos campos industriais. Conforme mostrado na Fig. 2, usaremos a tecnologia de localização do objeto na aplicação de inspeção, pois antes de realizar a inspeção, normalmente precisamos localizar a posição do objeto através do algoritmo de localização do objeto. Usamos também a localização do objeto na aplicação de medição dimensional pelo mesmo motivo. Assim, a Orientação por Visão é a tecnologia de visão industrial mais utilizada.
Existem vários produtos comerciais disponíveis no mercado para realizar Orientação por Visão, que podem ser categorizados em dois grupos: produto baseado na câmera inteligente e produto baseado na câmera tradicional. Os representantes da câmera inteligente são Cognex e Halcon. O representante da câmera tradicional é a Halcon. Na Tabela 1, listamos o custo para usar esse tipo de produto de visão de máquina. A câmera inteligente tem a boa usabilidade, alto custo do produto, baixo custo de desenvolvimento. A câmera tradicional tem usabilidade ruim, baixo custo do produto e alto custo de desenvolvimento. Na Fig. 3, podemos ver que o uso da câmera inteligente se dá principalmente através do mouse, arrastando e clicando. Para a câmera tradicional precisamos do engenheiro profissional para realizar a programação avançada. Assim, o custo total para ambos os tipos de produtos são altos. Também para câmera inteligente e para câmera tradicional, se quisermos usar a função de Orientação por Visão, precisamos comprar todos os pacotes de algoritmos, uma das razões para o alto custo.
É preciso usar um produto de Orientação por Visão personalizado para preencher a lacuna entre a necessidade do cliente e os produtos comerciais no mercado. Existem vários desafios ao desenvolvimento:
- Algoritmo de visão de máquina autoinovado: a razão para o alto custo do produto de Orientação por Visão comercial é o algoritmo de visão da máquina. Para reduzir o custo do sistema, não podemos comprar nenhuma biblioteca de visão de máquina comercial; é preciso desenvolvermos o algoritmo nós mesmos, já que as inovações geram a competência central para o nosso produto
- Baixo custo com desempenho competitivo: o cliente não aceitará um produto se o desempenho for ruim, mesmo que a baixo custo; então, nosso algoritmo de visão de máquina autoinovado deve ter desempenho competitivo em comparação com o produto comercial
- Configurável para diferentes tipos de aplicação de orientação: precisamos orientar diferentes tipos de unidades executáveis, como o robô SCARA, o robô de 6 eixos, cilindro, motor, e assim por diante; por isso precisamos de um sistema configurável, de forma que o usuário possa configurar o produto de acordo com a exigência das diferentes aplicações
- Uso amigável para os operadores: o produto deve ter a usabilidade similar à da câmera inteligente
- Qualidade de nível industrial para operação na linha de produção: o baixo custo não deve degradar a qualidade do produto
- Ser compatível com a fábrica digital: a fábrica digital é importante para a TE e muitos clientes estão interessados nela; por isso, devemos considerar o potencial de conectar-se à rede e trocar informações
Inovamos na solução configurável e personalizada de Orientação por Visão. Desenvolvemos todo o algoritmo de visão da máquina para Orientação por Visão por nossa própria conta e não compramos nenhum produto comercial disponível no mercado, o que reduz muito o custo do sistema. O desempenho do nosso sistema é comparável ao do produto comercial. Fornecemos o produto configurável que pode ser configurado para diferentes aplicações. Nossa solução tem o método de operação semelhante ao da câmera inteligente, o usuário pode conferir o software apenas arrastando e clicando com o mouse para realizar uma aplicação de Orientação por Visão. Validamos nosso produto realizando Orientação por Visão com vários tipos de robôs industriais, como o robô UR e o robô EPSON, e os resultados dos testes foram bons. Comparando o custo do produto comercial, a economia de custos por um conjunto é de cerca de US$ 5.000; e considerando que há mais de 200 potenciais oportunidades de implantação, a economia de custos para a tecnologia é superior a US$ 1 milhão.
MÉTODOS E RESULTADOS
Produto de Orientação por Visão AMT
Nosso produto fornece toda a solução para aplicações de Orientação por Visão. Conforme mostrado na Fig. 4, nosso pacote de produtos inclui o software, o controlador em miniatura e a câmera industrial de 2 megapixels. A câmera é usada para capturar a imagem, o software pode processar a imagem e realimentar o resultado processado, o controlador em miniatura é capaz de executar o software como o host.
O software é a chave para todo o sistema — ele não só está integrado com os algoritmos personalizados de visão da máquina como também permite operação configurável pelos usuários. Para o cliente ter a solução completa, também fornecemos a câmera e o controlador. O cliente não precisa gastar tempo na seleção de câmeras e seleção de host.
A estrutura e as funções do software
Desenvolver um software configurável é um projeto complexo. Por isso, em primeiro lugar, construímos a estrutura conceitual do software, como mostrado na Fig. 5. Com três camadas, cada uma delas serve apenas à camada acima de si e é servida pela camada abaixo dela. Os módulos de função são caracterizados em cada camada. Para melhorar a robustez de cada camada, o módulo de função em cada camada também é responsável por lidar com erros relacionados ao módulo de função.
A parte inferior é a camada de Entrada/Saída (E/S), que é responsável pela comunicação entre o software e o ambiente. Ela tem quatro módulos de função. O módulo de interface da câmera é usado para acionar a câmera, capturar imagens e ler/definir os parâmetros da câmera. O módulo TCP/UDP implementa os protocolos TCP e UDP, que permitem a comunicação com o dispositivo que tenha suporte para o protocolo TCP/UDP. Neste momento, quase todos os robôs industriais oferecem suporte ao protocolo TCP/UDP. O módulo de E/S digital permite a comunicação através da E/S digital tradicional. O módulo de arquivo é usado para arquivar as informações, como imagens, o registro do sistema, a receita de programação, o resultado da inspeção.
No meio está a camada de algoritmo e controle, que recebe imagens da camada de E/S, executa o processamento e a realimentação necessários para a camada de E/S e a camada de GUI. Além disso, essa camada é responsável pelo controle lógico de todo o software para agendar as tarefas complexas entre cada camada.
A camada superior é a camada GUI, que é usada para exibição de imagens e resultados. O usuário também pode ajustar a configuração do software por operações interativas.
A estrutura e as funções da biblioteca de visão de máquina
Na camada de algoritmo e controle, há uma biblioteca de algoritmos de visão de máquina autodesenvolvidos. A estrutura e a função da biblioteca são mostradas na Fig. 6. Duas funções principais da biblioteca de visão da máquina são como representar os dados da imagem e como processar a imagem.
A representação da imagem da biblioteca influencia a eficiência de leitura/gravação de dados da imagem na memória física do computador, por isso influencia muito a eficiência do algoritmo de visão da máquina. Por exemplo, para uma imagem de 2 megapixels, quando o sistema quiser ler os dados da imagem, o algoritmo executará a operação de leitura de pixels 2 milhões de vezes. Normalmente, cada algoritmo lerá os dados da imagem várias vezes; se a representação da imagem for ruim, a eficiência do algoritmo será muito reduzida. Quando testada em relação a nossa representação de imagem, a velocidade de uma boa representação é pelo menos 3 vezes mais rápida do que a de uma má representação.
Os dados de imagem da camada de E/S não têm a representação de imagem que definimos. Normalmente, existem três tipos de formatos de dados das camadas de E/S: dados de imagem bruta da câmera, do formato QT (Qimage) e do formato Visual Studio C++ (Cimage). Então, nós fornecemos especialmente o algoritmo de conversão de formato para converter os dados de imagem de entrada para a representação de imagem específica.
Sobre o algoritmo de processamento de imagens, a biblioteca de processamento de imagens fornece três módulos principais de função: 1) processamento de imagem, 2) processamento matemático e 3) licença
1. Processamento de imagem: módulo que tem o algoritmo de visão de máquina personalizado; dentro dele, os algoritmos de Orientação por Visão são reunidos em vários subgrupos. Cada subgrupo é responsável por cada tipo de algoritmo de processamento de imagens. Por exemplo, o subgrupo de localização de objeto fornece os algoritmos sobre correspondência de modelos, o subgrupo de calibração fornece os algoritmos sobre a função de calibração etc.
2. Processamento matemático: a operação matemática é a base para o algoritmo de processamento de imagens, que é frequentemente usado na biblioteca. Assim, realizamos nosso algoritmo de visão de máquina de alta eficiência dentro da biblioteca de visão de máquina. Este módulo conta com quatro subgrupos, como o subgrupo de Trigonometria, que fornece o algoritmo para calcular os valores trigonométricos. O subgrupo de Pesquisa fornece vários tipos de algoritmos de pesquisa
3. Licença: o algoritmo autoinovado é de propriedade da TE; por isso, fornecemos especialmente a função de criptografar e descriptografar para controlar a autorização do produto
Discussão e pontos-chave
Este documento ilustra um produto de Orientação por Visão repetível, escalável, acessível e fácil de usar para usuários de todos os níveis. Validamos nosso produto realizando Orientação por Visão com vários tipos de robôs industriais, como o robô UR e o robô EPSON, e os resultados dos testes foram bons.
AGRADECIMENTOS
Somos sinceramente gratos ao Sr. Josef Sinder, que compartilhou muita informação e tecnologia sobre o sistema integrado de visão da máquina.