
Whitepaper
Futuro dos sistemas não tripulados
O ambiente naval envolve desafios únicos – pressão, inundações, corrosão – para alimentar de forma confiável UUVs e USVs. As soluções de conectividade da TE Connectivity são projetadas para tratar desses desafios.
Autor:
Gregory Powers, ex-gerente de desenvolvimento de mercado, aeroespacial global, defesa e marinha. Greg não está mais com a TE.
O campo da robótica abrange todos os ambientes conhecidos pelo homem: mar, terra, ar e espaço. Muitos estão familiarizados com veículos aéreos não tripulados (UAVs) – ou sondas espaciais e rovers para planetas – quando pensam em sistemas não tripulados. Além dos UAVs, há também veículos submarinos não tripulados (UUVs) e navios de superfície não tripulados (USVs), que começaram a destacar-se nas manchetes em relação à segurança e defesa. Da mesma forma, veículos terrestres não tripulados (UGVs) estão agora obtendo a atenção. A Marinha dos EUA está até experimentando um robô humanoide (SAFFiR) para ajudar a combater incêndios em navios como socorrista.
A maioria dos UAVs usa vínculos de dados leves e normalmente tem um ambiente desobstruído para conversar em tempo real com as estações receptoras.
Cada um desses sistemas não tripulados é destinado a operar em um ambiente e ecossistema onde uma máquina pode fortalecer ou substituir um humano. Os motivos incluem segurança, preocupações ambientais, superioridade tecnológica ou custos. Enviar um veículo não tripulado pode ser menos perigoso e menos caro do que enviar um humano. Os requisitos de aplicação impulsionam a tecnologia dos blocos de construção eletromecânicos usados para criar o robô, e essas soluções podem variar do mundano ao extremo. Existem notáveis paradigmas tecnológicos e econômicos associados a cada missão que levam os engenheiros a selecionar soluções específicas de conectividade.
UAVs - SwaP e Largura de Banda
Seja lançado da reborda ou do transportador, os UAVs têm tudo a ver com SWaP (tamanho, peso, potência) e largura de banda. A construção leve, incluindo soluções de conectividade, é primordial para permitir a carga útil máxima, o alcance e o tempo na estação. Embora o processamento de sinais de alta velocidade seja importante na vigilância e aplicações similares, a largura de banda de comunicação é mais convenientemente tratada em UAVs do que em outros veículos não tripulados. A maioria dos UAVs usa vínculos de dados leves e normalmente tem um ambiente desobstruído para conversar em tempo real com as estações receptoras. Como resultado de seu ambiente, os UAVs se beneficiam de equipamentos leves de distribuição de energia de alta capacidade. Cabos e componentes de chicote tornaram-se mais leves ao longo dos anos. Os materiais de isolamento e capas de cabo transversais permitem espessuras significativamente mais finas na parede, economizando espaço e peso. Como cada grama conta, a TE Connectivity (TE) introduziu recentemente botas leves de redução de calor que são até 20% mais leves do que as peças que podem substituir. Em muitos casos, a conectividade de fibra óptica tem sido implementada como a exemplificação de baixo peso, alta largura de banda e imunidade a EMI.
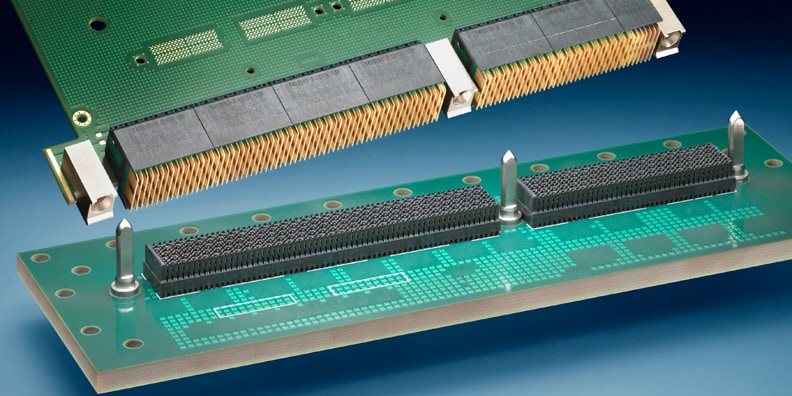
O processamento local de imagens e sinais de inteligência permite que o UAV selecione e priorize dados a serem transmitidos para a estação receptora. Com processamento sofisticado vem a necessidade de computação de bordo de alta velocidade. O conector de backplane MULTIGIG RT 2-R padrão VITA 46 VPX da TE (Figura 1) é adequado para esta função. O conector VPX de arquitetura aberta é modular e escalável para flexibilidade de aplicação, e demonstrou mais de 10 Gb/s para excelente densidade funcional. Os designers de UAV também estão se beneficiando de avanços na metalização composta e seletiva para criar gabinetes e antenas compostas integradas.
UGVs - Robusto e baseado em custos
O design do UGV tem tradicionalmente visado custos mais baixos como uma alta prioridade. Os motivos incluem o número potencialmente elevado de unidades produzidas, a natureza menos desafiadora do ambiente terrestre e o fato de que os UGVs são muitas vezes considerados dispensáveis. No entanto, espera-se que os UGVs sejam robustos e executem quando necessário, levando os designers a trilhar a linha tênue entre custo e desempenho. Os UGVs variam de rovers pequenos e baratos que podem ter uma câmera ou outro sensor a sistemas multifuncionais de alta capacidade. Dada a ampla gama dessas plataformas, as soluções de conectividade variam de conectores comerciais, industriais ou automotivos a conectores com especificação militar. Em cada caso, as soluções de conectividade devem ser adequadamente projetadas para se adequarem à aplicação.
Veículos como Humvees e caminhões para apoiar a logística estão sendo projetados para operar em modo tripulado ou não tripulado.
Em uma extremidade estão sistemas relativamente básicos, de baixo custo e potencialmente dispensáveis. Veículos como Humvees e caminhões para apoiar a logística estão sendo projetados para operar em modo tripulado ou não tripulado. Eles podem usar conectores automotivos resistentes ao clima, conectores IP67 de entrada/saída e conectores circulares militares ou de estilo militar. Os conectores MIL-DTL-38999 e seus parentes próximos continuam sendo uma das opções mais populares para interconexão robusta. Além de um conector totalmente qualificado, uma grande variedade de conectores usam a concha 38999 familiar como fator de forma básica. A nova geração de conectores circulares COTS de estilo militar são ideais para UGVs. Por exemplo, os conectores Wildcat Micro e 38999 da TE são baseados na prática de design de conector circular militar. Tendo entre 3 e 9 contatos, o mecanismo de engate da baioneta Wildcat Micro é muito robusto e permite um acoplamento rápido e positivo. Uma opção de acoplamento roscado de partida tripla antivibração também está disponível, bem como várias opções de montagem e recursos de acessório traseiro.

Baseado em Mil-DTL-38999, os conectores Wildcat 38999 estão disponíveis em quatro tamanhos de estrutura entre 11 e 64 contatos e oferecem quase o dobro da densidade de contato dos conectores 38999 tradicionais. A rosca de acoplamento de partida tripla oferece uma conexão robusta e de alta confiabilidade para ajudar a suportar choque severo e vibração, e os conectores estão totalmente vedados, uma característica vital para operação em qualquer clima ou potencial submersão durante uma missão. Além da robustez e alta densidade, muitos sistemas de sensores encontrados em sistemas não tripulados exigem largura de banda. O conector CeeLok FAS-X da TE suporta ethernet de 10 Gb/s em uma concha 38999 – acomodando um único canal Ethernet em uma concha tamanho 11 ou quatro canais em uma concha tamanho 25. Uma vantagem dos conectores derivados do 38999 é que eles podem usar as mesmas backshells disponíveis e outros acessórios.
UUVs – Ambiente desafiador
O ambiente naval traz desafios únicos, particularmente em termos de resistir às pressões submarinas, operar em um ambiente inundado e proteger contra corrosão induzida pelo sal. Os eletrônicos são frequentemente alojados em recipientes de contenção ou unidades substituíveis por linha (LRUs). Sujeitos aos efeitos da hidrodinâmica, os UUVs que devem operar a qualquer velocidade de avanço significativa, na maioria das vezes, têm seção transversal frontal mínima ou forma de torpedo e o espaço é muito reduzido. A necessidade de desempenho subaquático, bem como espaço e economia de peso de densidades maiores, muitas vezes estão em conflito. Dados os desafios resultantes da embalagem, conectores robustos com fator de forma pequeno, como os conectores SEACON MINI-CON com conexão a seco da TE, funcionam bem no ambiente UUV. Os conectores SEACON MINI-CON da TE foram desenvolvidos como um sistema de pequeno diâmetro, alta densidade e alta pressão, disponível em 13 tamanhos de conchas e até 203 contatos. O conector padrão suporta 16.000 psi, embora versões de maior pressão estejam disponíveis.

Os conectores de conexão úmida tendem a ser maiores, pois precisam de equilíbrio de pressão e um mecanismo para vedar os contatos do conector não acoplado. Eles também precisam de um ponto de entrada generoso para permitir o acoplamento adequado das metades do conector roboticamente por um UUV em um ambiente subaquático. Embora os conectores de conexão úmida tenham sido usados há muito tempo na produção de petróleo submarino, eles também podem encontrar uso em aplicações navais, como um sistema de acoplamento subaquático para UUVs. Ainda resta a necessidade de criar veículos submarinos autônomos. Os veículos operados remotamente usados em aplicações de petróleo e gás são controlados diretamente através de um longo cabo umbilical para energia, controle e dados. As linhas de energia e os cabos de fibra óptica no cabo umbilical fornecem energia e largura de banda adequadas. No entanto, o alcance, a liberdade e a discrição de veículos operados remotamente (ROVs) podem ser problemáticos em aplicações de defesa.
Cada ambiente – mar, terra, ar e espaço – apresenta seus próprios obstáculos e tem um efeito profundo no projeto do sistema não tripulado.
A operação autônoma desconectada pode criar seu próprio conjunto de problemas, incluindo meios de comunicação e fornecimento de energia. Um veículo subaquático não tem as mesmas capacidades convenientes de comunicação sem fio de um UAV ou UGV. A água não transmite bem os sinais de RF. Embora as comunicações acústicas ou antenas rebocadas de baixa frequência permitam algum grau de comunicação, elas não são eficientes para cargas úteis de dados mais altas. Um uso comum para sinais acústicos é simplesmente dizer ao UUV para vir à tona para enviar ou receber comunicações. Uma vez na superfície, o UUV tem capacidades de comunicação clara com navios próximos ou com satélites. Como consequência dos problemas de comunicação, muitos UUVs não realizam intenso processamento de sinal a bordo. Ao contrário do processamento de sinal pesado realizado por um UAV para obter fotos e vídeos de alta resolução, as necessidades de um UUV tendem a ser mais humildes. Se o computador de bordo estiver bem protegido contra água e pressão, seu ambiente operacional é relativamente benigno — sem o choque e vibração que os UAVs e os UGVs experimentam. Os sistemas de computação de bordo COTS fornecerão a energia de processamento necessária de robustez mecânica e ambiental necessária. Os conectores vedados são necessários entre o ambiente protegido e o resto do UUV. A fonte de alimentação em UUVs é tipicamente por bateria. A tecnologia mais recente em baterias, bem como a distribuição eficiente de energia e sistemas de baixo consumo de energia são vitais para o alcance e o sucesso da missão. Minimizar o SWaP é um tema comum no design de sistema não tripulado.
Mundo não tripulado
À medida que as tecnologias de sensores, softwares e processamento evoluem, a eficácia e a presença de sistemas robóticos não tripulados também. Uma coisa que não vai mudar são os desafios ambientais enfrentados pelos sistemas robóticos. Cada ambiente – mar, terra, ar e espaço – apresenta seus próprios obstáculos e tem um efeito profundo no projeto do sistema não tripulado. Esses desafios variam desde o nível mais básico, por exemplo, seleção de materiais, até o mais alto, como o nível de autonomia exigido. Da mesma forma, o papel da conectividade e da gama de soluções disponíveis para o designer é afetado pelo ambiente do sistema não tripulado. À medida que a ciência interconectada funde a forma e a função, o papel da conectividade continuará a aumentar de importância no futuro do design do sistema não tripulado.
