Desenvolvimento do Sistema de Transporte Móvel Autônomo
RESUMO
Robôs móveis autônomos estão desempenhando um papel importante no transporte flexível de materiais. O robô móvel desenvolvido com base em SLAM (Simultaneous Localization and Mapping – Localização e mapeamento simultâneos) é totalmente capaz de criar mapas, encontrar caminhos e sua otimização, bem como evitar obstáculos. Ele é mais flexível e ágil para automatizar a logística da fábrica para transformação digital em armazenamento automático e transporte de materiais. Investigamos as aplicações de tecnologias de navegação com os robôs móveis e desenvolvemos soluções de perspectiva estratégica para automatizar os processos de aranha d'água.
DECLARAÇÃO DO PROBLEMA
A abordagem convencional de transporte de materiais é usar um aranha d'água para transportar materiais do supermercado de materiais ou armazém para as áreas de produção. A Fig. 1 ilustra um processo geral de aranha d'água com operador para empurrar/puxar um trailer carregado com caixas de materiais em uma instalação da TE. Normalmente, os materiais não são transportados diretamente para as linhas de produção, mas primeiro para uma área de buffer, conforme mostrado na Fig. 2. As linhas de produção retiram os materiais da área de buffer e, uma vez verificados sem quantidade suficiente de materiais para apoiar a produção pelas próximas 2 ou mais horas, a linha de produção coloca uma etiqueta na área de buffer para notificar a solicitação de materiais. Os responsáveis pelos materiais verificam a disponibilidade de materiais na área de buffer assim que veem/recebem o pedido de material. Eles devem ajudar a solicitar materiais do supermercado ou armazém de materiais, com o aranha d'água alocado para transportar os materiais. Obviamente, a abordagem convencional é trabalhosa e tem baixa eficiência. Além disso, geralmente há muitos tipos diferentes de materiais para gerenciar, e é preciso um pouco de esforço para encontrar/localizar materiais, o que afeta ainda mais a eficiência do transporte de materiais. O pior é que o aranha d'água manual pode não responder à solicitação de transporte de materiais em tempo hábil, o que pode fazer com que as linhas de produção aguardem a chegada dos materiais e afeta a produtividade das linhas de produção.
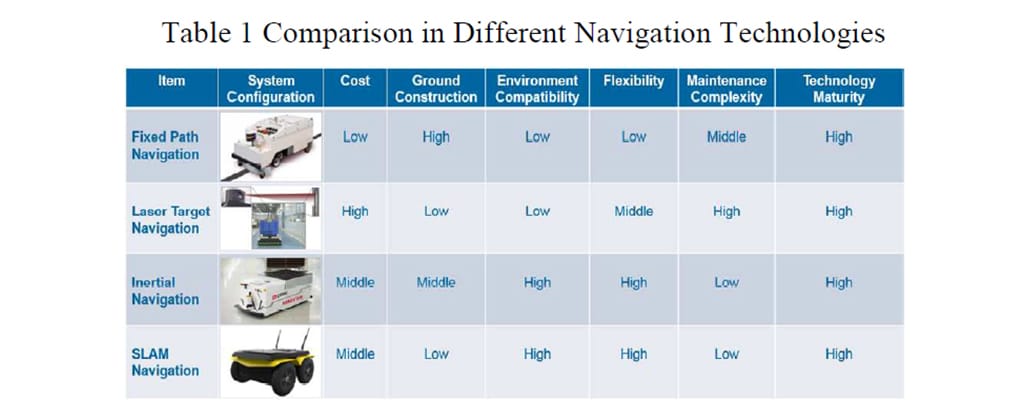
A automação e a transformação digital ajudam em grande parte a melhorar a eficiência do transporte de materiais e a reduzir o tempo de resposta. Robôs móveis autônomos, capazes de se movimentar de forma autônoma e aprimorados com conexões digitais às linhas de produção e sistemas MES (Manufacturing Execution System – Sistema de execução de fabricação), são excelentes alternativas para substituir os aranhas d'água manuais. Geralmente, existem quatro tipos principais de tecnologias de navegação: navegação de caminho fixo, navegação a laser, navegação inercial e navegação SLAM, conforme mostrado na Tabela 1. O método de navegação de caminho fixo, que requer a construção de fitas magnéticas a serem coladas no chão para guiar o robô móvel, tem a menor mobilidade e flexibilidade. A navegação a laser, que depende de o alvo refletir o feixe de laser de volta para o robô para localização precisa, é de baixa compatibilidade no ambiente e, uma vez que a posição do alvo é alterada ou bloqueada por outros obstáculos, será muito difícil de navegar com precisão no robô móvel. A navegação inercial, que exige a construção do piso com a instalação de pregos magnéticos ou colagem de códigos QR, tem melhor compatibilidade com a mudança de layout do entorno, mas só é acessível às áreas construídas com pregos magnéticos ou códigos QR. A navegação SLAM, que é totalmente capaz de atualizar o mapa em tempo real para encontrar caminhos, evitar obstáculos e proporciona uma navegação autônoma, tem a mais alta compatibilidade com o ambiente e flexibilidade para se movimentar de forma autônoma e é uma tecnologia de navegação ideal para transporte flexível de materiais nas áreas de produção que têm interações frequentes com humanos ou outros dispositivos móveis. A Tabela 1 faz uma comparação entre as diferentes tecnologias de navegação. Nossa direção é desenvolver sistemas de transporte móvel autônomo baseados em navegação SLAM para a TE.
MÉTODOS E RESULTADOS
Tecnologia de Navegação de Ponta em Robôs Móveis
A navegação, que se baseia na localização e percepção do ambiente, é um tópico de pesquisa de alto nível em robótica. Geralmente, um planejador de caminho global é bom em produzir um caminho otimizado, mas ruim em reagir a obstáculos desconhecidos. Em contraste, um método de navegação local/reativo funciona bem em ambientes dinâmicos e inicialmente desconhecidos, mas é ineficiente especialmente em ambientes complexos[1]. Esta pesquisa estuda algoritmos de planejamento de caminhos globais e locais e propõe o método de navegação híbrida.
O planejamento global de trajetórias tem sido bastante estudado na área acadêmica e aplicado em muitos casos práticos. O algoritmo baseado em gráfico é um ramo comumente usado entre eles, como o gráfico Dijkstra[2], A*[3] e o gráfico Voronoi,[4] que geralmente são usados em uma área limitada. Os métodos de APF (Artificial Potential Field – Campo potencial artificial)[5] utilizam mais informações do ambiente e são adequados para navegação em tempo real.
No entanto, as trajetórias geradas pelo APF geralmente não são ideais. O processo de decisão de Markov é um método probabilístico em que a decisão se refere apenas ao último estado e não tem nada a ver com mais estados anteriores. Além disso, alguns outros algoritmos de planejamento de caminho global [6] são discutidos para descobrir o caminho e atingir o objetivo.
O planejamento de caminho local lida com a prevenção de obstáculos em um ambiente local. O MPC (Model Predictive Control – Controle preditivo de modelo) [7] é cada vez mais aplicado na navegação de robôs móveis autônomos devido à sua robustez e convergência no planejamento de caminhos. A ideia principal do MPC é prever o futuro com um modelo customizado para fazer o planejamento de caminhos e então aplicar o controle inicial correspondente à trajetória escolhida para o robô móvel. A DWA (Dynamic Window Approach – Abordagem de janela dinâmica)[8], que avalia cada trajetória e seleciona aquela com maior pontuação, não é apenas um algoritmo independente, mas também um componente do MPC. No entanto, a DWA assume que todos os obstáculos são estáticos, o que não é aplicável para evitar obstáculos dinâmicos com velocidade relativamente alta. Algoritmos como obstáculos de velocidade e cones de colisão assumem que os obstáculos se movem com velocidade e aceleração determinísticas.
Obviamente, na maioria das instalações da TE, existem layouts relativamente estáticos nos equipamentos e linhas de produção com ambientes conhecidos, e também movimentação imprevisível de operadores de dispositivos, que são considerados obstáculos dinâmicos, nem as abordagens de planejamento de caminho global nem de planejamento de caminho local funcionariam bem para as navegações dos robôs móveis. É necessário desenvolver um método híbrido com um planejador de trajeto local combinado e um planejador de trajeto global para realizar a navegação.
Base da Navegação Autônoma – Construção de Mapas
Quando o robô móvel autônomo é implantado em um ambiente desconhecido para encontrar de forma autônoma o caminho para atingir o objetivo, ele deve percorrer todo o ambiente até atingir o objetivo. Embora alguns novos objetivos sejam adicionados e definidos, é imprudente comandar o robô para percorrer o ambiente todas as vezes, pois isso gera alto custo de tempo de computação e de espaço de armazenamento.
Além disso, o objetivo geralmente é uma posição relativa em relação ao robô móvel enquanto navega pelo ambiente. Portanto, é importante empregar um descritor ambiental, por exemplo o mapa, para registrar e descrever as informações do ambiente para que o robô saiba onde está e para onde exatamente ir. Existem diferentes variações
para o mapa, como o mapa de recursos, mapa de topologia, mapa de grade e o método baseado em aparência. O mapa de recursos, que descreve o ambiente com pontos-chave, linhas ou planos, contribui para uma visualização animada.
O mapa de topologia descreve os nós e a conectividade do ambiente. O método baseado em aparência calcula a pose dos robôs diretamente. O mapa de grade leva em conta tanto a simplicidade quanto a visualização na representação do ambiente. Portanto, o mapa de grade é uma ótima escolha como descritor ambiental para a navegação dos robôs móveis. Esta seção estuda a abordagem para a construção de mapeamento de um ambiente desconhecido para obtenção de um mapa de grade.
Sem conhecimento prévio do ambiente, o SLAM, que constrói o mapa do ambiente desconhecido enquanto rastreia a pose do robô simultaneamente, desempenha um papel vital na construção do mapa. Em nosso método, o filtro de partículas Rao-Blackwellized é usado para SLAM para garantir a robustez e a qualidade do mapeamento. Um dos algoritmos de filtragem de partículas mais comuns é o filtro SIR (Sampling Importance Resampling – Amostragem e reamostragem por importância). O processo de mapeamento com filtro SIR Rao-Blackwellized é decomposto nas seguintes etapas:
- Amostragem: a pose atual do robô xt(i) é calculada com a última pose do robô xt-1(i) pela distribuição proposta π(xt|z1:t,u0:t)
- Ponderação de Importância: cada partícula é formulada em sua própria ponderação, conforme descrito por Eq.(1)

- Reamostragem: para evitar o número infinito de partículas e garantir a convergência do algoritmo, a quantidade de partículas deve ser reduzida, e as partículas de pesos de baixa importância são substituídas por aquelas de alta para o processo de reamostragem.
- Estimativa do mapa: O mapa atual mt(i) é estimado com as observações históricas z1:t e poses x1:t.
Portanto, a ideia principal do filtro de partículas Rao-Blackwellized é calcular uma probabilidade posterior sobre mapas e trajetórias, conforme formulado por Eq.(2)
P(x1:t, m|z1:t, u0:t) = P(x1:t, m|x1:t, z1:t)P(x1:t|z1:t,u0:t) (2)
Onde, u0:t é a sequência de medições de odometria incluindo pose inicial, z1:t é a sequência de observações, x1:t descreve as trajetórias potenciais e m representa o mapa.
Um ambiente de simulação é construído para verificar o algoritmo de construção do mapa, conforme mostrado na Fig. 3. O robô móvel está se movendo pelo espaço livre, o ambiente é delimitado por paredes circundantes e as caixas internas ilustram diferentes estações, que podem ser consideradas obstáculos. A área azul mostrada na Fig. 3 é o alcance de varredura do robô móvel. Ao comandar o robô móvel para se movimentar por todo este ambiente de simulação, o Mapa de Grade é construído com base nas tecnologias SLAM, conforme mostrado na Fig. 4.
Planejamento de caminho em ambiente conhecido
Com a disponibilidade do mapa para o ambiente, a posição inicial do robô móvel costuma ser definida como um ponto inicial e a meta é definida como o ponto final no mapa para construir o caminho a ser indicado ao robô. Encontrar um caminho acessível do ponto inicial ao ponto final e comandar o robô para se mover ao longo dele, considerando a dinâmica do robô e arredores, são funções chamadas de planejador de caminho global e planejador de caminho local.
No processo de planejamento de caminho global, o algoritmo de Dijkstra e A* são duas maneiras principais de pesquisar o caminho mais curto, que são caracterizados com pesquisa em largura e pesquisa em profundidade, respectivamente. Eles são brevemente descritos como indicado na Tabela 2.
Breve Descrição de Algoritmo de Dijkstra e A*
Tabela 2
| Algoritmo de Dijkstra | Algoritmo A* |
|---|---|
(1) Defina o valor da distância inicial para cada nó; atribua 0 ao nó inicial e infinito aos outros (2) Defina o nó inicial como atual e marque todos os outros nós como não visitados (3) Para o nó atual, encontre o nó mais próximo cuja distância ao conjunto visitado seja menor. (4) Marque o nó mais próximo como visitado para que nunca seja verificado novamente (5) Se o nó que era o alvo foi marcado como visitado, então a busca está terminada. Caso contrário, repita a etapa (3) |
(1) Defina o nó inicial como o nó atual. Calcule o peso para seus vizinhos usando f(n) = g(n) + h(n), onde g(n) é o custo do caminho do nó inicial e ℎ(n) é o custo estimado de n até o alvo (2) Defina o nó cujo peso é menor como o nó atual e continue a etapa de (1) (3) Repita (1) & (2) até que o alvo seja identificado como nó atual |
Independentemente do método escolhido, um caminho acessível pode ser gerado teoricamente. No entanto, um caminho acessível não significa um caminho executável. O planejador de caminho local cria uma ponte entre o caminho acessível e o caminho executável. Nesta pesquisa, o algoritmo de janela dinâmica é usado, e o algoritmo inclui as seguintes etapas:
- Amostragem discreta no espaço de controle do robô
- Preveja o que aconteceria para cada amostra potencial com estimativa direta
- Avalie essas trajetórias candidatas a partir do ponto de distância e da coincidência do caminho global
- Escolha a trajetória com maior pontuação
- Enxague e repita
Para a geração do caminho executável, o planejador de caminho local apresenta grande vantagem em evitar obstáculos. Quando o robô móvel segue o caminho global, as observações locais constroem o mapa local para que obstáculos novos/imprevistos sejam marcados no mapa local. Em seguida, o planejador de caminho local geraria um caminho local para evitar interferência com esses obstáculos. Neste caso, o robô pode evitar obstáculos estáticos e dinâmicos com baixa velocidade.
Simulação de Navegação Autônoma
Um ambiente de simulação é configurado como Fig. 3, e o mapa do ambiente foi construído na Seção II.B com base no algoritmo SLAM. O algoritmo de planejamento de caminho é testado sobre o mapa com o algoritmo de Dijkstra implementado e verificado nesta parte. Em primeiro lugar, a pose atual do robô é configurada no mapa e definida como o ponto inicial.
O robô receberá o comando de seguir o caminho que é planejado por meio do planejador de caminho global após o alvo ter sido definido. Como indicado na Fig. 5, o caminho azul é o caminho global do início até o alvo, enquanto o amarelo é o caminho local que segue o caminho global. Com base em várias rodadas de testes para verificação, conclui-se que a abordagem de Dijkstra poderia gerar um caminho global acessível
e o caminho local gerado pelo DWA pode construir o caminho executável a ser alinhado com o caminho global.
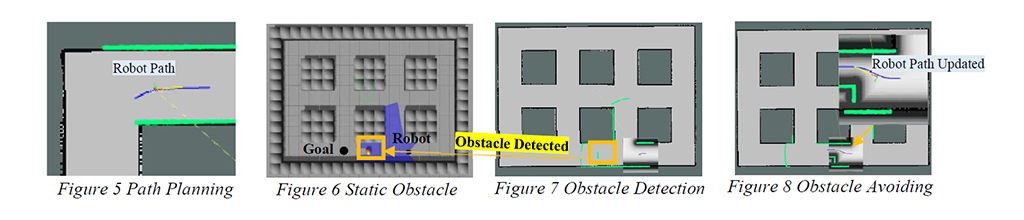
A capacidade de evitar obstáculos também é avaliada aqui. Como indicado na Fig. 6, um obstáculo imprevisto, que não está marcado no mapa, aparece bem na frente do robô. O obstáculo está na faixa de varredura do scanner a laser e é detectado pelo robô, conforme mostrado na Fig. 7. Para testar se o robô seria capaz de evitar a interferência do novo obstáculo e
passar por ele, um Alvo é configurado logo após o obstáculo detectado para verificar como o robô se comporta em relação ao obstáculo imprevisto para atingir o Alvo. Durante a execução do planejador de caminho local, um mapa local é gerado conforme mostrado na Fig. 8, com o obstáculo atualizado; a curva amarela é o caminho local gerado para evitar o obstáculo. É possível observar
que o robô não está se movendo diretamente para a frente para causar interferência com o obstáculo, em vez disso, ele segue um caminho adaptado movendo-se ao redor do obstáculo para evitar colisões. Portanto, é possível verificar a capacidade do robô de passar pelo obstáculo estático. O teste também foi realizado com a adição de alguns obstáculos dinâmicos que também são capazes de se mover pelo mapa em uma velocidade relativamente baixa e podem se deparar com o robô. Os resultados do teste também mostram que o robô é capaz de atualizar seu mapa local, com base no caminho local gerado, para evitar colisões com os obstáculos dinâmicos. Os resultados da simulação verificam a abordagem híbrida com a combinação de planejador de trajetória global e planejador de trajetória local no planejamento de trajetória do robô e na prevenção de obstáculos.
DISCUSSÃO E PONTOS-CHAVE
Veículo de Transporte Móvel Autônomo
As principais tecnologias desenvolvidas e verificadas na Seção II sobre construção de mapas e planejamento de caminhos com SLAM aprimoram a capacidade de navegação autônoma para o robô móvel. Conforme comparado na Tabela 1, a tecnologia de navegação baseada em SLAM não requer a construção do piso com fita magnética, pregos magnéticos ou código QR; também não há necessidade de colar o alvo do laser nas paredes ou estruturas fixas. É totalmente capaz de construir o mapa de um ambiente automaticamente, e pode lidar bem para evitar colisões com obstáculos imprevistos que não estão marcados no mapa. O robô móvel baseado em SLAM é a alternativa ideal a ser usada no desenvolvimento de um sistema de transporte móvel autônomo.
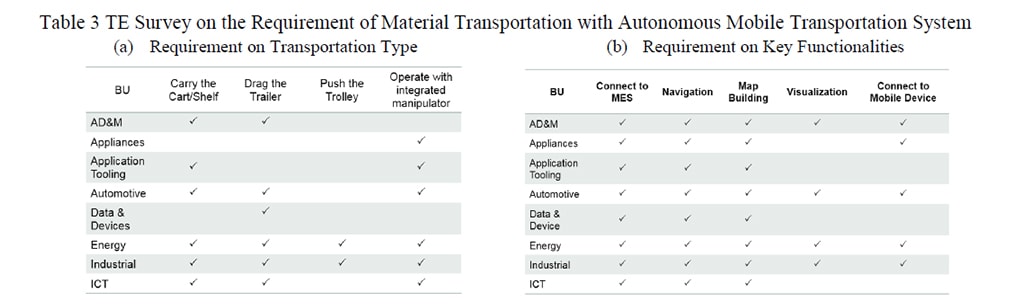
Uma pesquisa foi realizada em todas as unidades de negócios da TE para detalhar os requisitos do transporte móvel autônomo de materiais. Algumas grandes prioridades no tipo de transporte de materiais são fazer com que o robô móvel carregue o carrinho/prateleira, arraste o trailer e integre um manipulador para operar os materiais, conforme mostrado na Tabela 3(a). As principais funcionalidades com alta prioridade para implementar no robô móvel autônomo são conectar-se ao MES, navegar de forma autônoma e construir o mapa automaticamente, conforme mostrado na Tabela 3(b). Entre todas as expectativas, a automação do processo de aranha d'água com o robô móvel foi classificado com alta prioridade pelas Unidades de Negócios. Como mostrado na Fig. 9, o processo de aranha d'água foi o
processo mais crítico para o transporte de materiais do Armazém / Supermercado de Materiais para as Áreas de Produção. Aqui temos a proposta de desenvolver um veículo de AMT (Autonomous Mobile Transportation – Transporte móvel autônomo) do tipo latente, baseado na tecnologia de navegação SLAM para transportar a prateleira para transporte flexível de materiais conforme mostrado na Fig. 10. O veículo autônomo é capaz de suportar uma carga útil de mais de 300 kg, e pode funcionar a uma velocidade de 0,8 ~ 1 m/s na instalação. É uma alternativa altamente eficiente e eficaz para substituir o processo de aranha d'água manual.
Sistema de Transporte Móvel Autônomo
Com a disponibilidade dos veículos de transporte móvel autônomo, a chave é integrar os veículos como parte do AMTS (Autonomous Transportation System – Sistema de transporte autônomo) para desenvolver soluções completas para as instalações da TE. A Fig. 9 ilustra o processo geral para o transporte de materiais. Geralmente, é preciso operador para desembalar as caixas de material e classificar os materiais no
armazém, transferindo os materiais triados para as caixas a serem armazenadas no supermercado de materiais. São utilizadas aranhas d'água manuais para transportar os materiais do supermercado de materiais para a área de buffer. As linhas de produção buscam os materiais na área de buffer.
Considerando o fato de que quase todas as instalações da TE ainda não automatizaram nenhuma parte do processo
do armazém à linha de produção, aqui primeiro propõe-se automatizar o processo de aranha d'água com o veículo de transporte móvel autônomo, conforme mostrado na Fig. 10. Obviamente, o veículo AMT fornece soluções de automação de transporte de materiais de ponta a ponta do supermercado de materiais até a linha de produção. O veículo AMT é rápido em resposta e eficiente no transporte de materiais, o que reduz significativamente o custo de mão de obra e economiza as áreas de buffer que precisam de aranhas d'água manuais.
Para ampliar ainda mais o benefício do uso do veículo AMT em sua capacidade de ser conectado digitalmente às redes. Também temos a proposta de transformar o processo de solicitação de material de operação manual com trabalhos em papel para um processo digital. Considerando que atualmente é comum ver operadores/técnicos/engenheiros usando os smartphones, temos uma proposta de desenvolvimento de um aplicativo a ser instalado nos terminais móveis para solicitação de material e comunicação, conforme mostrado na Fig. 11. Por uma questão de segurança nas comunicações, os aplicativos e veículos AMT, bem como o servidor estarão conectados às redes locais da TE, sendo permitido apenas aos funcionários autorizados fazer login no aplicativo ou acessar o sistema para solicitação de materiais, comunicações, e também para monitoramento.

Portanto, a arquitetura do sistema de transporte móvel autônomo é proposta conforme mostrado na Fig. 12. Todos os veículos AMT são gerenciados pelo sistema de coordenação central AMTS para alocação de tarefas, planejamento de caminhos e controle de tráfego.
Os aplicativos também são conectados ao sistema de coordenação central AMTS, e uma vez que as linhas de produção solicitam materiais via aplicativo móvel, o operador do supermercado de materiais recebe a solicitação e prepara os materiais com antecedência, posteriormente o sistema de coordenação central AMTS atribui um veículo AMT para executar a tarefa de material.
transportes. Após o veículo AMT entregar com sucesso os materiais para as linhas de produção, os operadores podem clicar em confirmar para liberar o recurso deste veículo AMT a ser planejado pelo sistema de coordenação central AMTS.
AGRADECIMENTOS
Os autores agradecem as sugestões e instruções de Josef Sinder da Automotive BU, Tim Darr da AMT Harrisburg. Os autores também agradecem a equipe Automotive Suzhou por apresentar o requisito para implementar a automação do transporte de materiais para a instalação da Automotive Suzhou.
REFERÊNCIAS
[1] Wang, Lim Chee, Lim Ser Yong e Marcelo H. Ang. "Hybrid of global path planning and local navigation implemented on a mobile robot in indoor environment." Intelligent Control, 2002. Proceedings of the 2002 IEEE International Symposium on. IEEE, 2002.
[2] Skiena, S. "Dijkstra’s algorithm." Implementing Discrete Mathematics: Combinatorics and Graph Theory with Mathematica, Reading, MA: Addison-Wesley (1990): 225-227.
[3] Duchoň, František, et al. "Path planning with modified A star algorithm for a mobile robot." Procedia Engineering 96 (2014): 59-69.
[4] Garrido, Santiago, et al. "Path planning for mobile robot navigation using voronoi diagram and fast marching." Intelligent Robots and Systems, 2006 IEEE/RSJ International Conference on. IEEE, 2006.
[5] Warren, Charles W. "Global path planning using artificial potential fields."Robotics and Automation, 1989. Proceedings., 1989 IEEE International Conference on. IEEE, 1989.
[6] Hoy, Michael, Alexey S. Matveev, and Andrey V. Savkin. "Algorithms for collision-free navigation of mobile robots in complex cluttered environments: a survey." Robotica 33.03 (2015): 463-497.
[7] Morari, Manfred, et al. "Model predictive control." Preprint (2002).
[8] Fox, Dieter, Wolfram Burgard, and Sebastian Thrun. "The dynamic window approach to collision avoidance." IEEE Robotics & Automation Magazine 4.1 (1997): 23-33.
Desenvolvimento do Sistema de Transporte Móvel Autônomo
RESUMO
Robôs móveis autônomos estão desempenhando um papel importante no transporte flexível de materiais. O robô móvel desenvolvido com base em SLAM (Simultaneous Localization and Mapping – Localização e mapeamento simultâneos) é totalmente capaz de criar mapas, encontrar caminhos e sua otimização, bem como evitar obstáculos. Ele é mais flexível e ágil para automatizar a logística da fábrica para transformação digital em armazenamento automático e transporte de materiais. Investigamos as aplicações de tecnologias de navegação com os robôs móveis e desenvolvemos soluções de perspectiva estratégica para automatizar os processos de aranha d'água.
DECLARAÇÃO DO PROBLEMA
A abordagem convencional de transporte de materiais é usar um aranha d'água para transportar materiais do supermercado de materiais ou armazém para as áreas de produção. A Fig. 1 ilustra um processo geral de aranha d'água com operador para empurrar/puxar um trailer carregado com caixas de materiais em uma instalação da TE. Normalmente, os materiais não são transportados diretamente para as linhas de produção, mas primeiro para uma área de buffer, conforme mostrado na Fig. 2. As linhas de produção retiram os materiais da área de buffer e, uma vez verificados sem quantidade suficiente de materiais para apoiar a produção pelas próximas 2 ou mais horas, a linha de produção coloca uma etiqueta na área de buffer para notificar a solicitação de materiais. Os responsáveis pelos materiais verificam a disponibilidade de materiais na área de buffer assim que veem/recebem o pedido de material. Eles devem ajudar a solicitar materiais do supermercado ou armazém de materiais, com o aranha d'água alocado para transportar os materiais. Obviamente, a abordagem convencional é trabalhosa e tem baixa eficiência. Além disso, geralmente há muitos tipos diferentes de materiais para gerenciar, e é preciso um pouco de esforço para encontrar/localizar materiais, o que afeta ainda mais a eficiência do transporte de materiais. O pior é que o aranha d'água manual pode não responder à solicitação de transporte de materiais em tempo hábil, o que pode fazer com que as linhas de produção aguardem a chegada dos materiais e afeta a produtividade das linhas de produção.
A automação e a transformação digital ajudam em grande parte a melhorar a eficiência do transporte de materiais e a reduzir o tempo de resposta. Robôs móveis autônomos, capazes de se movimentar de forma autônoma e aprimorados com conexões digitais às linhas de produção e sistemas MES (Manufacturing Execution System – Sistema de execução de fabricação), são excelentes alternativas para substituir os aranhas d'água manuais. Geralmente, existem quatro tipos principais de tecnologias de navegação: navegação de caminho fixo, navegação a laser, navegação inercial e navegação SLAM, conforme mostrado na Tabela 1. O método de navegação de caminho fixo, que requer a construção de fitas magnéticas a serem coladas no chão para guiar o robô móvel, tem a menor mobilidade e flexibilidade. A navegação a laser, que depende de o alvo refletir o feixe de laser de volta para o robô para localização precisa, é de baixa compatibilidade no ambiente e, uma vez que a posição do alvo é alterada ou bloqueada por outros obstáculos, será muito difícil de navegar com precisão no robô móvel. A navegação inercial, que exige a construção do piso com a instalação de pregos magnéticos ou colagem de códigos QR, tem melhor compatibilidade com a mudança de layout do entorno, mas só é acessível às áreas construídas com pregos magnéticos ou códigos QR. A navegação SLAM, que é totalmente capaz de atualizar o mapa em tempo real para encontrar caminhos, evitar obstáculos e proporciona uma navegação autônoma, tem a mais alta compatibilidade com o ambiente e flexibilidade para se movimentar de forma autônoma e é uma tecnologia de navegação ideal para transporte flexível de materiais nas áreas de produção que têm interações frequentes com humanos ou outros dispositivos móveis. A Tabela 1 faz uma comparação entre as diferentes tecnologias de navegação. Nossa direção é desenvolver sistemas de transporte móvel autônomo baseados em navegação SLAM para a TE.
MÉTODOS E RESULTADOS
Tecnologia de Navegação de Ponta em Robôs Móveis
A navegação, que se baseia na localização e percepção do ambiente, é um tópico de pesquisa de alto nível em robótica. Geralmente, um planejador de caminho global é bom em produzir um caminho otimizado, mas ruim em reagir a obstáculos desconhecidos. Em contraste, um método de navegação local/reativo funciona bem em ambientes dinâmicos e inicialmente desconhecidos, mas é ineficiente especialmente em ambientes complexos[1]. Esta pesquisa estuda algoritmos de planejamento de caminhos globais e locais e propõe o método de navegação híbrida.
O planejamento global de trajetórias tem sido bastante estudado na área acadêmica e aplicado em muitos casos práticos. O algoritmo baseado em gráfico é um ramo comumente usado entre eles, como o gráfico Dijkstra[2], A*[3] e o gráfico Voronoi,[4] que geralmente são usados em uma área limitada. Os métodos de APF (Artificial Potential Field – Campo potencial artificial)[5] utilizam mais informações do ambiente e são adequados para navegação em tempo real.
No entanto, as trajetórias geradas pelo APF geralmente não são ideais. O processo de decisão de Markov é um método probabilístico em que a decisão se refere apenas ao último estado e não tem nada a ver com mais estados anteriores. Além disso, alguns outros algoritmos de planejamento de caminho global [6] são discutidos para descobrir o caminho e atingir o objetivo.
O planejamento de caminho local lida com a prevenção de obstáculos em um ambiente local. O MPC (Model Predictive Control – Controle preditivo de modelo) [7] é cada vez mais aplicado na navegação de robôs móveis autônomos devido à sua robustez e convergência no planejamento de caminhos. A ideia principal do MPC é prever o futuro com um modelo customizado para fazer o planejamento de caminhos e então aplicar o controle inicial correspondente à trajetória escolhida para o robô móvel. A DWA (Dynamic Window Approach – Abordagem de janela dinâmica)[8], que avalia cada trajetória e seleciona aquela com maior pontuação, não é apenas um algoritmo independente, mas também um componente do MPC. No entanto, a DWA assume que todos os obstáculos são estáticos, o que não é aplicável para evitar obstáculos dinâmicos com velocidade relativamente alta. Algoritmos como obstáculos de velocidade e cones de colisão assumem que os obstáculos se movem com velocidade e aceleração determinísticas.
Obviamente, na maioria das instalações da TE, existem layouts relativamente estáticos nos equipamentos e linhas de produção com ambientes conhecidos, e também movimentação imprevisível de operadores de dispositivos, que são considerados obstáculos dinâmicos, nem as abordagens de planejamento de caminho global nem de planejamento de caminho local funcionariam bem para as navegações dos robôs móveis. É necessário desenvolver um método híbrido com um planejador de trajeto local combinado e um planejador de trajeto global para realizar a navegação.
Base da Navegação Autônoma – Construção de Mapas
Quando o robô móvel autônomo é implantado em um ambiente desconhecido para encontrar de forma autônoma o caminho para atingir o objetivo, ele deve percorrer todo o ambiente até atingir o objetivo. Embora alguns novos objetivos sejam adicionados e definidos, é imprudente comandar o robô para percorrer o ambiente todas as vezes, pois isso gera alto custo de tempo de computação e de espaço de armazenamento.
Além disso, o objetivo geralmente é uma posição relativa em relação ao robô móvel enquanto navega pelo ambiente. Portanto, é importante empregar um descritor ambiental, por exemplo o mapa, para registrar e descrever as informações do ambiente para que o robô saiba onde está e para onde exatamente ir. Existem diferentes variações
para o mapa, como o mapa de recursos, mapa de topologia, mapa de grade e o método baseado em aparência. O mapa de recursos, que descreve o ambiente com pontos-chave, linhas ou planos, contribui para uma visualização animada.
O mapa de topologia descreve os nós e a conectividade do ambiente. O método baseado em aparência calcula a pose dos robôs diretamente. O mapa de grade leva em conta tanto a simplicidade quanto a visualização na representação do ambiente. Portanto, o mapa de grade é uma ótima escolha como descritor ambiental para a navegação dos robôs móveis. Esta seção estuda a abordagem para a construção de mapeamento de um ambiente desconhecido para obtenção de um mapa de grade.
Sem conhecimento prévio do ambiente, o SLAM, que constrói o mapa do ambiente desconhecido enquanto rastreia a pose do robô simultaneamente, desempenha um papel vital na construção do mapa. Em nosso método, o filtro de partículas Rao-Blackwellized é usado para SLAM para garantir a robustez e a qualidade do mapeamento. Um dos algoritmos de filtragem de partículas mais comuns é o filtro SIR (Sampling Importance Resampling – Amostragem e reamostragem por importância). O processo de mapeamento com filtro SIR Rao-Blackwellized é decomposto nas seguintes etapas:
- Amostragem: a pose atual do robô xt(i) é calculada com a última pose do robô xt-1(i) pela distribuição proposta π(xt|z1:t,u0:t)
- Ponderação de Importância: cada partícula é formulada em sua própria ponderação, conforme descrito por Eq.(1)
- Reamostragem: para evitar o número infinito de partículas e garantir a convergência do algoritmo, a quantidade de partículas deve ser reduzida, e as partículas de pesos de baixa importância são substituídas por aquelas de alta para o processo de reamostragem.
- Estimativa do mapa: O mapa atual mt(i) é estimado com as observações históricas z1:t e poses x1:t.
Portanto, a ideia principal do filtro de partículas Rao-Blackwellized é calcular uma probabilidade posterior sobre mapas e trajetórias, conforme formulado por Eq.(2)
P(x1:t, m|z1:t, u0:t) = P(x1:t, m|x1:t, z1:t)P(x1:t|z1:t,u0:t) (2)
Onde, u0:t é a sequência de medições de odometria incluindo pose inicial, z1:t é a sequência de observações, x1:t descreve as trajetórias potenciais e m representa o mapa.
Um ambiente de simulação é construído para verificar o algoritmo de construção do mapa, conforme mostrado na Fig. 3. O robô móvel está se movendo pelo espaço livre, o ambiente é delimitado por paredes circundantes e as caixas internas ilustram diferentes estações, que podem ser consideradas obstáculos. A área azul mostrada na Fig. 3 é o alcance de varredura do robô móvel. Ao comandar o robô móvel para se movimentar por todo este ambiente de simulação, o Mapa de Grade é construído com base nas tecnologias SLAM, conforme mostrado na Fig. 4.
Planejamento de caminho em ambiente conhecido
Com a disponibilidade do mapa para o ambiente, a posição inicial do robô móvel costuma ser definida como um ponto inicial e a meta é definida como o ponto final no mapa para construir o caminho a ser indicado ao robô. Encontrar um caminho acessível do ponto inicial ao ponto final e comandar o robô para se mover ao longo dele, considerando a dinâmica do robô e arredores, são funções chamadas de planejador de caminho global e planejador de caminho local.
No processo de planejamento de caminho global, o algoritmo de Dijkstra e A* são duas maneiras principais de pesquisar o caminho mais curto, que são caracterizados com pesquisa em largura e pesquisa em profundidade, respectivamente. Eles são brevemente descritos como indicado na Tabela 2.
Breve Descrição de Algoritmo de Dijkstra e A*
Tabela 2
| Algoritmo de Dijkstra | Algoritmo A* |
|---|---|
(1) Defina o valor da distância inicial para cada nó; atribua 0 ao nó inicial e infinito aos outros (2) Defina o nó inicial como atual e marque todos os outros nós como não visitados (3) Para o nó atual, encontre o nó mais próximo cuja distância ao conjunto visitado seja menor. (4) Marque o nó mais próximo como visitado para que nunca seja verificado novamente (5) Se o nó que era o alvo foi marcado como visitado, então a busca está terminada. Caso contrário, repita a etapa (3) |
(1) Defina o nó inicial como o nó atual. Calcule o peso para seus vizinhos usando f(n) = g(n) + h(n), onde g(n) é o custo do caminho do nó inicial e ℎ(n) é o custo estimado de n até o alvo (2) Defina o nó cujo peso é menor como o nó atual e continue a etapa de (1) (3) Repita (1) & (2) até que o alvo seja identificado como nó atual |
Independentemente do método escolhido, um caminho acessível pode ser gerado teoricamente. No entanto, um caminho acessível não significa um caminho executável. O planejador de caminho local cria uma ponte entre o caminho acessível e o caminho executável. Nesta pesquisa, o algoritmo de janela dinâmica é usado, e o algoritmo inclui as seguintes etapas:
- Amostragem discreta no espaço de controle do robô
- Preveja o que aconteceria para cada amostra potencial com estimativa direta
- Avalie essas trajetórias candidatas a partir do ponto de distância e da coincidência do caminho global
- Escolha a trajetória com maior pontuação
- Enxague e repita
Para a geração do caminho executável, o planejador de caminho local apresenta grande vantagem em evitar obstáculos. Quando o robô móvel segue o caminho global, as observações locais constroem o mapa local para que obstáculos novos/imprevistos sejam marcados no mapa local. Em seguida, o planejador de caminho local geraria um caminho local para evitar interferência com esses obstáculos. Neste caso, o robô pode evitar obstáculos estáticos e dinâmicos com baixa velocidade.
Simulação de Navegação Autônoma
Um ambiente de simulação é configurado como Fig. 3, e o mapa do ambiente foi construído na Seção II.B com base no algoritmo SLAM. O algoritmo de planejamento de caminho é testado sobre o mapa com o algoritmo de Dijkstra implementado e verificado nesta parte. Em primeiro lugar, a pose atual do robô é configurada no mapa e definida como o ponto inicial.
O robô receberá o comando de seguir o caminho que é planejado por meio do planejador de caminho global após o alvo ter sido definido. Como indicado na Fig. 5, o caminho azul é o caminho global do início até o alvo, enquanto o amarelo é o caminho local que segue o caminho global. Com base em várias rodadas de testes para verificação, conclui-se que a abordagem de Dijkstra poderia gerar um caminho global acessível
e o caminho local gerado pelo DWA pode construir o caminho executável a ser alinhado com o caminho global.
A capacidade de evitar obstáculos também é avaliada aqui. Como indicado na Fig. 6, um obstáculo imprevisto, que não está marcado no mapa, aparece bem na frente do robô. O obstáculo está na faixa de varredura do scanner a laser e é detectado pelo robô, conforme mostrado na Fig. 7. Para testar se o robô seria capaz de evitar a interferência do novo obstáculo e
passar por ele, um Alvo é configurado logo após o obstáculo detectado para verificar como o robô se comporta em relação ao obstáculo imprevisto para atingir o Alvo. Durante a execução do planejador de caminho local, um mapa local é gerado conforme mostrado na Fig. 8, com o obstáculo atualizado; a curva amarela é o caminho local gerado para evitar o obstáculo. É possível observar
que o robô não está se movendo diretamente para a frente para causar interferência com o obstáculo, em vez disso, ele segue um caminho adaptado movendo-se ao redor do obstáculo para evitar colisões. Portanto, é possível verificar a capacidade do robô de passar pelo obstáculo estático. O teste também foi realizado com a adição de alguns obstáculos dinâmicos que também são capazes de se mover pelo mapa em uma velocidade relativamente baixa e podem se deparar com o robô. Os resultados do teste também mostram que o robô é capaz de atualizar seu mapa local, com base no caminho local gerado, para evitar colisões com os obstáculos dinâmicos. Os resultados da simulação verificam a abordagem híbrida com a combinação de planejador de trajetória global e planejador de trajetória local no planejamento de trajetória do robô e na prevenção de obstáculos.
DISCUSSÃO E PONTOS-CHAVE
Veículo de Transporte Móvel Autônomo
As principais tecnologias desenvolvidas e verificadas na Seção II sobre construção de mapas e planejamento de caminhos com SLAM aprimoram a capacidade de navegação autônoma para o robô móvel. Conforme comparado na Tabela 1, a tecnologia de navegação baseada em SLAM não requer a construção do piso com fita magnética, pregos magnéticos ou código QR; também não há necessidade de colar o alvo do laser nas paredes ou estruturas fixas. É totalmente capaz de construir o mapa de um ambiente automaticamente, e pode lidar bem para evitar colisões com obstáculos imprevistos que não estão marcados no mapa. O robô móvel baseado em SLAM é a alternativa ideal a ser usada no desenvolvimento de um sistema de transporte móvel autônomo.
Uma pesquisa foi realizada em todas as unidades de negócios da TE para detalhar os requisitos do transporte móvel autônomo de materiais. Algumas grandes prioridades no tipo de transporte de materiais são fazer com que o robô móvel carregue o carrinho/prateleira, arraste o trailer e integre um manipulador para operar os materiais, conforme mostrado na Tabela 3(a). As principais funcionalidades com alta prioridade para implementar no robô móvel autônomo são conectar-se ao MES, navegar de forma autônoma e construir o mapa automaticamente, conforme mostrado na Tabela 3(b). Entre todas as expectativas, a automação do processo de aranha d'água com o robô móvel foi classificado com alta prioridade pelas Unidades de Negócios. Como mostrado na Fig. 9, o processo de aranha d'água foi o
processo mais crítico para o transporte de materiais do Armazém / Supermercado de Materiais para as Áreas de Produção. Aqui temos a proposta de desenvolver um veículo de AMT (Autonomous Mobile Transportation – Transporte móvel autônomo) do tipo latente, baseado na tecnologia de navegação SLAM para transportar a prateleira para transporte flexível de materiais conforme mostrado na Fig. 10. O veículo autônomo é capaz de suportar uma carga útil de mais de 300 kg, e pode funcionar a uma velocidade de 0,8 ~ 1 m/s na instalação. É uma alternativa altamente eficiente e eficaz para substituir o processo de aranha d'água manual.
Sistema de Transporte Móvel Autônomo
Com a disponibilidade dos veículos de transporte móvel autônomo, a chave é integrar os veículos como parte do AMTS (Autonomous Transportation System – Sistema de transporte autônomo) para desenvolver soluções completas para as instalações da TE. A Fig. 9 ilustra o processo geral para o transporte de materiais. Geralmente, é preciso operador para desembalar as caixas de material e classificar os materiais no
armazém, transferindo os materiais triados para as caixas a serem armazenadas no supermercado de materiais. São utilizadas aranhas d'água manuais para transportar os materiais do supermercado de materiais para a área de buffer. As linhas de produção buscam os materiais na área de buffer.
Considerando o fato de que quase todas as instalações da TE ainda não automatizaram nenhuma parte do processo
do armazém à linha de produção, aqui primeiro propõe-se automatizar o processo de aranha d'água com o veículo de transporte móvel autônomo, conforme mostrado na Fig. 10. Obviamente, o veículo AMT fornece soluções de automação de transporte de materiais de ponta a ponta do supermercado de materiais até a linha de produção. O veículo AMT é rápido em resposta e eficiente no transporte de materiais, o que reduz significativamente o custo de mão de obra e economiza as áreas de buffer que precisam de aranhas d'água manuais.
Para ampliar ainda mais o benefício do uso do veículo AMT em sua capacidade de ser conectado digitalmente às redes. Também temos a proposta de transformar o processo de solicitação de material de operação manual com trabalhos em papel para um processo digital. Considerando que atualmente é comum ver operadores/técnicos/engenheiros usando os smartphones, temos uma proposta de desenvolvimento de um aplicativo a ser instalado nos terminais móveis para solicitação de material e comunicação, conforme mostrado na Fig. 11. Por uma questão de segurança nas comunicações, os aplicativos e veículos AMT, bem como o servidor estarão conectados às redes locais da TE, sendo permitido apenas aos funcionários autorizados fazer login no aplicativo ou acessar o sistema para solicitação de materiais, comunicações, e também para monitoramento.
Portanto, a arquitetura do sistema de transporte móvel autônomo é proposta conforme mostrado na Fig. 12. Todos os veículos AMT são gerenciados pelo sistema de coordenação central AMTS para alocação de tarefas, planejamento de caminhos e controle de tráfego.
Os aplicativos também são conectados ao sistema de coordenação central AMTS, e uma vez que as linhas de produção solicitam materiais via aplicativo móvel, o operador do supermercado de materiais recebe a solicitação e prepara os materiais com antecedência, posteriormente o sistema de coordenação central AMTS atribui um veículo AMT para executar a tarefa de material.
transportes. Após o veículo AMT entregar com sucesso os materiais para as linhas de produção, os operadores podem clicar em confirmar para liberar o recurso deste veículo AMT a ser planejado pelo sistema de coordenação central AMTS.
AGRADECIMENTOS
Os autores agradecem as sugestões e instruções de Josef Sinder da Automotive BU, Tim Darr da AMT Harrisburg. Os autores também agradecem a equipe Automotive Suzhou por apresentar o requisito para implementar a automação do transporte de materiais para a instalação da Automotive Suzhou.
REFERÊNCIAS
[1] Wang, Lim Chee, Lim Ser Yong e Marcelo H. Ang. "Hybrid of global path planning and local navigation implemented on a mobile robot in indoor environment." Intelligent Control, 2002. Proceedings of the 2002 IEEE International Symposium on. IEEE, 2002.
[2] Skiena, S. "Dijkstra’s algorithm." Implementing Discrete Mathematics: Combinatorics and Graph Theory with Mathematica, Reading, MA: Addison-Wesley (1990): 225-227.
[3] Duchoň, František, et al. "Path planning with modified A star algorithm for a mobile robot." Procedia Engineering 96 (2014): 59-69.
[4] Garrido, Santiago, et al. "Path planning for mobile robot navigation using voronoi diagram and fast marching." Intelligent Robots and Systems, 2006 IEEE/RSJ International Conference on. IEEE, 2006.
[5] Warren, Charles W. "Global path planning using artificial potential fields."Robotics and Automation, 1989. Proceedings., 1989 IEEE International Conference on. IEEE, 1989.
[6] Hoy, Michael, Alexey S. Matveev, and Andrey V. Savkin. "Algorithms for collision-free navigation of mobile robots in complex cluttered environments: a survey." Robotica 33.03 (2015): 463-497.
[7] Morari, Manfred, et al. "Model predictive control." Preprint (2002).
[8] Fox, Dieter, Wolfram Burgard, and Sebastian Thrun. "The dynamic window approach to collision avoidance." IEEE Robotics & Automation Magazine 4.1 (1997): 23-33.