Conexão sem contato
Nossos sensores magnéticos fornecem dados precisos e confiáveis sem a necessidade de contato físico.
Sensores que monitoram propriedades como temperatura, pressão, deformação ou fluxo fornecem um sinal de saída diretamente relacionado ao parâmetro desejado. Sensores magnéticos, por outro lado, diferem da maioria desses detectores, já que muitas vezes não medem diretamente a propriedade física de interesse, e sim alterações ou perturbações nos campos magnéticos que foram criados ou modificados por objetos ou eventos. Os campos magnéticos podem, portanto, conter informações sobre propriedades como direção, presença, rotação, ângulo ou correntes elétricas, que são convertidas em uma tensão elétrica pelo sensor magnético. Uma pequena quantidade de sensores magnéticos mede campos magnéticos de forma absoluta, como o campo magnético da Terra em bússolas.
O sinal de saída requer algum processamento de sinal para ser traduzido no parâmetro desejado. Obviamente, a distribuição do campo magnético depende da distância e da forma do objeto/evento gerador ou perturbador (ou seja, ímãs, correntes etc.). Portanto, é importante sempre considerar tanto o sensor quanto o objeto criador na concepção da aplicação. Embora os sensores magnéticos sejam um pouco mais difíceis de usar, os dados que eles fornecem são precisos e confiáveis sem que haja a necessidade de manter contato físico com o objeto medido.
EFEITO MAGNETORRESISTIVO
A origem física do efeito magnetorresistivo nos metais de transição reside na dependência da direção da magnetização na dispersão dos elétrons. Nos metais de transição, os principais portadores de corrente são os elétrons 4s, pois possuem maior mobilidade do que os elétrons 3d. A dispersão de elétrons das bandas s para as bandas d é encontrada com maior intensidade quando os elétrons estão se movendo paralelamente à magnetização.
Pontes de Wheatstone
Na maioria das aplicações, o elemento Hunt acadêmico não é adequado, pois não fornece uma referência zero. Essa desvantagem, bem como a dependência da resistência em relação à temperatura, podem ser evitadas com o uso de uma ponte de Wheatstone.
Unidades magnéticas
Para o leitor comum, que não é especialista em magnetismo, a questão das unidades magnéticas pode parecer bastante confusa. A tabela a seguir ajudará a encontrar rapidamente os fatores de conversão entre as diferentes unidades utilizadas:
| Unidade 1 | Multiplique por | = Unidade 2 | Comentário |
|---|---|---|---|
| Tesla | 104 | Gauss | |
| Oerstedt |
1 | Gauss | μr = 1 ! |
| Oerstedt | 79,58 | A/m | 103/(4xπ) |
| Weber | 108 | Maxwell |
Tabela 1: Fatores de conversão para unidades magnéticas (para informações detalhadas, consulte a página inicial do NIST).
SENSORES MAGNETORRESISTIVOS
Tipos de sensores por campo magnético
Os sensores magnetorresistivos podem ser divididos em dois grupos. Em aplicações onde a intensidade do campo aplicado é intensa o suficiente para saturar o material macio do sensor magnético (aproximadamente H>10 kA/m), o vetor de magnetização no sensor é sempre (quase) paralelo ao campo aplicado. Uma aplicação comum para um sensor magnetorresistivo de campo alto é um sensor angular sem contato, como o KMT32B, o KMT36H ou os sensores de posição MLS. Em aplicações de campo magnético baixo, o vetor de magnetização é determinado principalmente pela forma das tiras, porque a magnetização mostra uma preferência natural pela direção longitudinal. O campo externo provoca uma torção α na magnetização da faixa, o que altera a resistência devido ao efeito MR. Sensores lineares de baixo campo, como o MR174B, sensores KMY e sensores de comutação, como o MS32, normalmente operam nesse modo.
Sensores Magnetorresistivos
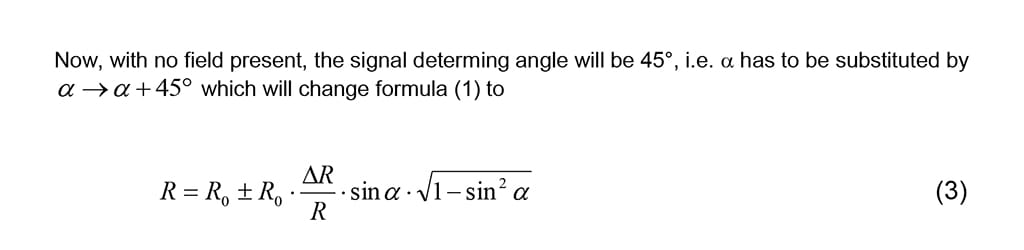
Com curva de transferência linearizada
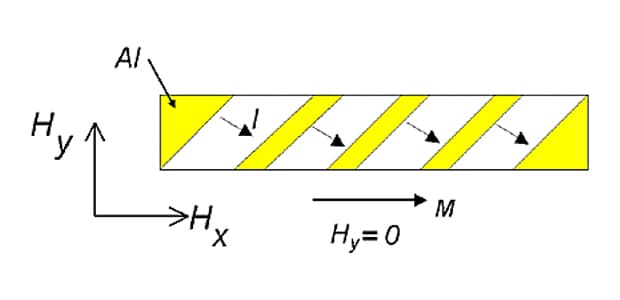
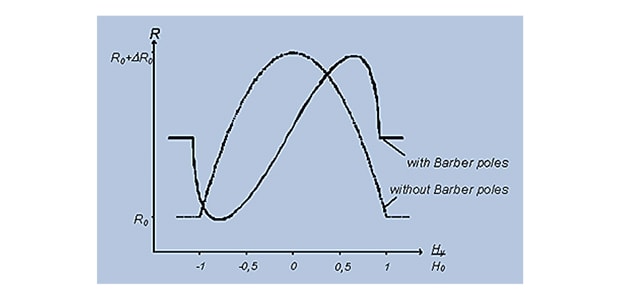
A aplicação de campos magnéticos baixos a um elemento Hunt levará apenas a pequenas mudanças na magnetização e, por sua vez, o termo cos na fórmula (1) dificilmente mudará com pequenas alterações de α. Um elemento Hunt não é sensível a pequenas forças de campo. Para tornar o sensor magnetorresisitivo sensível a campos magnéticos baixos, a curva de transferência MR (1) precisa ser modificada. A maneira mais comum é alcançada por “barras de barbeiro” (ver Figura 2).
Pequenas barras altamente condutoras, as barras de barbeiro, são colocadas em cima do Permalloy. Elas derivarão a corrente no Permalloy e mudarão o caminho da corrente devido à sua geometria, mas não alterarão o comportamento magnético. A corrente nos espaços entre as barras de barbeiro seguirá o caminho mais curto, perpendicular.
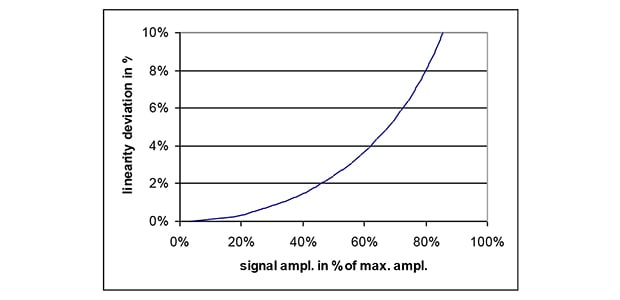
Linearidade do sensor
A linearidade do sinal de saída do sensor depende da relação entre a amplitude do sinal real e a amplitude máxima do sinal de tensão de saída. A Figura 4 mostra o desvio de linearidade em relação a esse quociente (em percentual):
Estabilidade do sensor
A energia magnetostática é a mesma para um domínio magnético, quer ele esteja, por exemplo, paralelo ou antiparalelo ao campo externo. Em outras palavras, os domínios magnéticos podem alternar entre duas direções em um ambiente estável. Isso não é um problema no caso dos sensores de alto campo, pois a curva de transferência é quadrática em α. No entanto, isso tem efeitos dramáticos no caso de um sensor de barra tipo "barbeiro", uma vez que o sinal de saída agora também muda.
Por esse motivo, os sensores magnetorresistivos de baixo campo, como o sensor tipo "barra de barbeiro", precisam ser estabilizados (polarizados) por um campo adicional externo (Hx), que é orientado de forma favorável ao longo da faixa de RM (ou seja, na direção x). A única tarefa desse campo é definir uma direção preferencial para o alinhamento dos domínios magnéticos. O campo de polarização deve ser forte o suficiente para que campos perturbadores não alterem seus domínios. Foi descoberto empiricamente que campos de polarização com intensidade superior a aproximadamente 2,5 kA/m garantem o desempenho adequado do sensor.
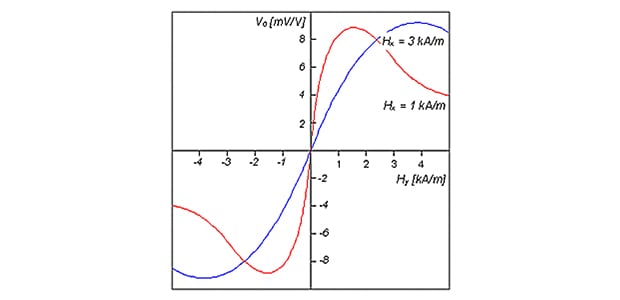
Campos de polarização menores
Deve-se ter em mente que um campo de polarização alterará a sensibilidade do sensor. Isso é ilustrado na figura 6 e na tabela 2.
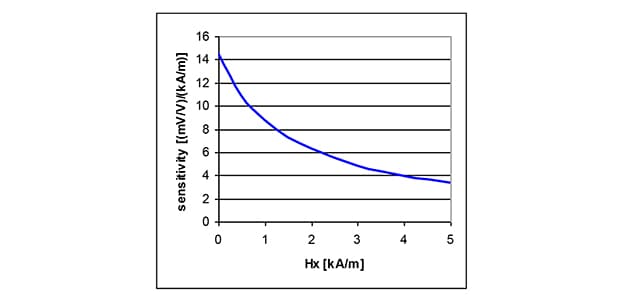
Em algumas aplicações, uma alta sensibilidade é desejada. Nesse caso, é possível trabalhar sem um campo de polarização. Para fazer isso, o sensor deve ser bem condicionado: imediatamente antes da medição, a magnetização é invertida por um curto pulso magnético em uma direção x definida (pré-magnetização). Para evitar que a magnetização da faixa seja invertida durante o tempo entre a pré-magnetização e a medição, os campos externos devem ser limitados a aproximadamente menos de 0,5 kA/m.
| Campo de polarização Hx em kA/m |
Faixa de campo de operação em kA/m |
Sensibilidade S em mV/V/kA/m | Campo máximo Hy, máx. em kA/M |
Comentário |
| 0 | 0,35 | 14 | 0,5 | Pré-magnetização necessária |
| 1 | 0,5 | 10,5 | 0,5 | Pré-magnetização necessária |
| 2 | 1,1 | 6,3 | 1 | Pré-magnetização recomendada |
| 3 | 1,4 | 4,9 | ∞ | Estável |
| 5 | 2 | 3,4 | ∞ | Estável |
Tabela 2: Sensibilidade e área de operação recomendada.
Ímãs Permanentes e Sensores de “Barra de Barbeiro”
O campo de estabilização Hx costuma ser gerado por um ímã permanente. Ao usar o KMY20S ou KMZ20S, o cliente deve aplicar um ímã permanente para gerar o campo de polarização necessário. O KMY20M e KMZ20M são fornecidos com um ímã de ferrite rígido interno. A força máxima do campo externo é limitada apenas pela estabilidade do material magnético permanente. No caso dos tipos KMY20M e KMZ20M, campos perturbadores superiores a aproximadamente 40 kA/m (500 Gauss) podem alterar a direção de magnetização do ímã permanente irreversível. Isso pode levar a uma mudança permanente na tensão de desvio e à destruição da função do sensor. Essa limitação pode ser ampliada pelo uso de sensores do tipo S em combinação com outros ímãs, como, por exemplo, ímãs de terras raras, que devem ser fornecidos pelo usuário.
Temperatura
Tanto a resistência ôhmica quanto a magnetorresistência têm origem em processos de dispersão dos elétrons condutores. Como todos os processos de dispersão dependem da temperatura, a resistência da ponte e o efeito magnetorresisitivo ∆R/R também apresentam uma dependência da temperatura. Os coeficientes de temperatura geralmente estão relacionados a duas temperaturas por meio de:
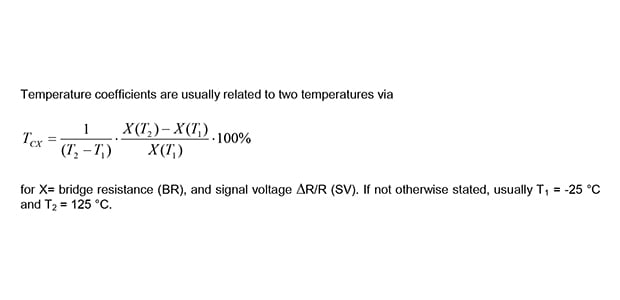
No caso do Permalloy, tanto a resistência da ponte quanto o coeficiente de temperatura de amplitude têm aproximadamente o mesmo valor, mas diferem no sinal TCBR≈-TCSV.
Esse fato permite ao usuário compensar a dependência da temperatura da sensibilidade usando uma fonte de corrente constante. Nesse caso, a tensão de alimentação aumenta com o aumento da temperatura e o aumento da resistência da ponte. Esse efeito provoca um aumento na tensão de saída, o que compensa a perda de sensibilidade.
Outro valor importante é o coeficiente de temperatura do desvio. Esse coeficiente de temperatura é causado por pequenas diferenças no comportamento da temperatura dos quatro resistores da ponte. Na prática, observa-se uma deriva na tensão de saída, que não pode ser separada do sinal de saída regular causado por campos magnéticos. Em aplicações que utilizam acoplamento de sinal CC, o coeficiente de temperatura do deslocamento limitará a precisão da medição.
O Permalloy é um material muito resistente que pode suportar temperaturas muito altas, de até aproximadamente 300 °C, quando protegido por um revestimento. Nesse caso, o encapsulamento será o fator limitante.

Andreas Voss apresenta detalhes sobre a tecnologia de sensores magnetorresistivos e onde a tecnologia do sensor pode ser aplicada.