
Whitepaper
Fusão em Sensores de Inclinação
Saiba como a fusão de sensores desempenha um papel vital na nova geração de sensores de inclinação.
INTRODUÇÃO
Um sensor de inclinação ou tombamento fornece informações angulares de inclinação relativas à força gravitacional. Essas informações podem ser usadas para monitorar o estado do equipamento ou podem ser usadas para controlar as características de um dispositivo ou veículo. Diferentes tipos de sensores também são usados em diferentes aplicações. Baratos, os sensores de inclinação de montagem em superfície estão se tornando cada vez mais populares na tecnologia portátil. Eles são usados para monitorar o ângulo em que um telefone é mantido para a função de rotação automática. Outro exemplo é o uso de sensores de inclinação em consoles de jogos.
Sensores de inclinação robustos são usados em diversas máquinas industriais, bem como uma série de veículos on e off road e equipamentos de construção. Esses sensores são usados para uma variedade de funções, incluindo controle de passeio, nivelamento da cabine, medição de ângulo de boom, bem como proteção contra capotamento. Os requisitos de segurança estão sendo adicionados em uma gama de veículos e equipamentos de construção que requerem sensores para monitorar a inclinação ou inclinação para garantir a segurança do operador e das pessoas próximas.
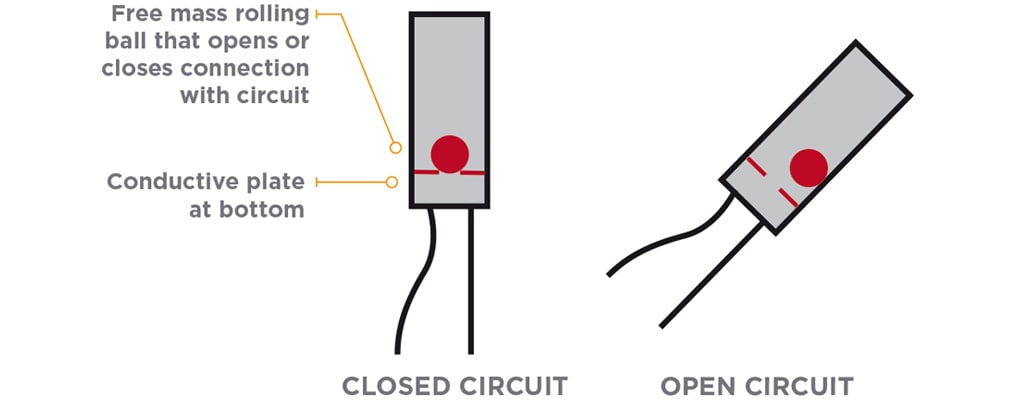
A tecnologia para sensores de inclinação ou tombamento evoluiu ao longo dos anos de simples interruptores de inclinação para sensores totalmente eletrônicos sofisticados que combinam múltiplas tecnologias de detecção. Muitos anos atrás, esses dispositivos não eram sensores, mas interruptores que consistiam em uma esfera livre com uma placa condutora embaixo. Os interruptores foram projetados de tal forma que um nível suficiente de inclinação permitiria que a esfera rolasse para o fundo e formasse uma conexão elétrica com a placa e esse sinal poderia ser usado como um indicador ou para ligar ou desligar algo.
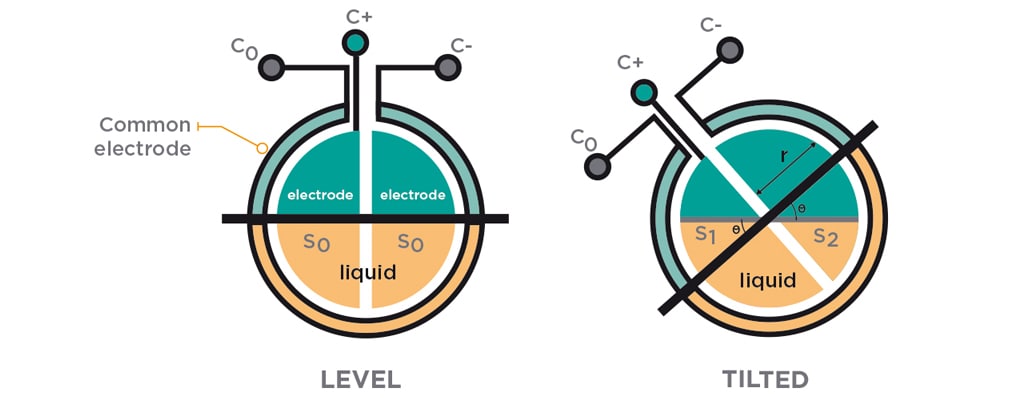
Os primeiros sensores de inclinação continham líquidos resistivos ou capacitivos dentro de uma cavidade vedada. À medida que a cápsula se inclina de ponta a ponta, o líquido flui para um lado ou para o outro, o que altera a resistência ou a capacitância de um circuito interno, e a saída do circuito poderia ser monitorada diretamente, ou a saída poderia ser amplificada ou traduzida em outros formatos de saída. Embora esses sensores pudessem fornecer dados de inclinação precisos e confiáveis em muitas aplicações, eles tinham várias fraquezas, incluindo resposta ao tempo lento, suscetibilidade à vibração e sloshing e vida útil limitada.
OS SENSORES DE INCLINAÇÃO OU TOMBAMENTO MODERNOS NORMALMENTE USAM TECNOLOGIA DE MEMS.
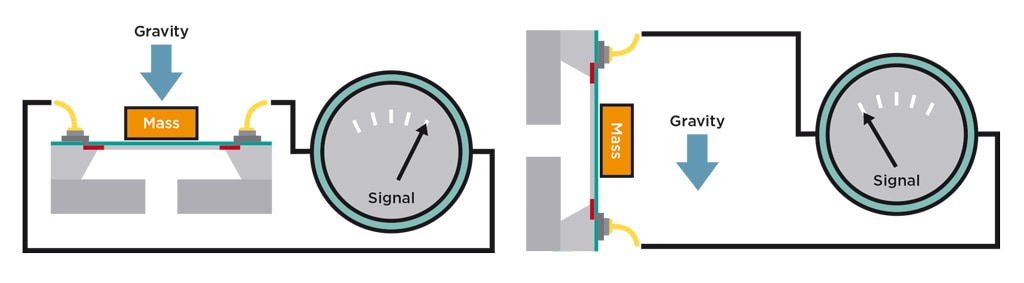
MEMS (Microelectromechanical Systems – Sistemas microeletromecânicos) de estado sólido são pequenos sensores, pois consistem em placas de massa à prova de movimento que são anexadas a um quadro de referência através de um sistema de suspensão mecânica. Essa é uma técnica de combinação de componentes mecânicos e elétricos em um chip para gerar um sistema com dimensões em miniatura. Para um sensor de inclinação baseado em MEMS, uma massa é adicionada ao molde de silicone do sensor. Na posição horizontal, a força da gravidade deflexiona o molde (como a aplicação de pressão) e produz uma saída elétrica. À medida que o molde é girado para a posição vertical, a força no molde vai para zero, assim como a saída elétrica. A saída é um número complementar de 16 bits que representa o ângulo de inclinação em graus. O sensor de inclinação baseado em MEMS resolveu muitos dos problemas com tecnologias baseadas em líquido.
A função e a precisão de um sensor de inclinação são afetadas por muitos fatores. Alguns desses fatores são gravidade, temperatura, calibração do sensor de inclinação, linearidade e sensibilidade interaxial. Algumas das principais especificações de um sensor de inclinação:
- Número de eixos: o número de eixos é um fator importante, pois varia de aplicação para aplicação. Na robótica, é usado um sensor de inclinação de dois eixos. Em controladores de videogame e joysticks, é necessário um sensor de inclinação de três eixos. Em alguns smartphones, sensores de quatro eixos são usados.
- Resolução: a inclinação mínima detectada e a saída pelo sensor
- Faixa de medição: a faixa de inclinação que pode ser manuseada pelo sensor. Alguns sensores são capazes medir apenas em intervalos de 10°, enquanto outros podem cobrir uma faixa de 60°, 75° ou até 90°.
- Tolerância ao ruído: o ruído tende a causar distorções harmônicas na função do sensor, resultando em variação de saída e redução da eficiência do sistema.
- Vibrações e choques: vibrações podem interromper a funcionalidade do sensor e, portanto, medidas de resistência à vibração são necessárias, especialmente quando os sensores são usados em condições adversas, por exemplo, em veículos off road ou canteiros de obras.
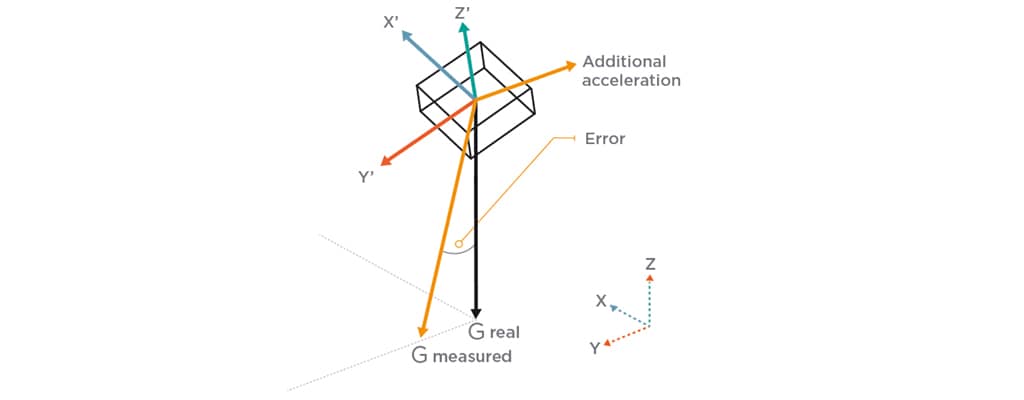
Além disso, é importante diferenciar entre aplicações (quase) estáticas e dinâmicas. Em uma aplicação dinâmica, o sensor é influenciado por aceleração adicional, enquanto em aplicações estáticas ou em câmera lenta essa aceleração normalmente pode ser negligenciada. Para detecção de inclinação estática, as tecnologias de detecção comumente usadas são baseadas estritamente na gravidade, por exemplo
- acelerômetros, hoje geralmente do tipo MEMS
- elementos cheios de líquido, condutivos ou não condutivos com leitura eletrônica
- cavidade de convecção com aquecedor
- pêndulo com codificador ou potenciômetro
Condição estática significa que o veículo não está se movendo ou o veículo está se movendo em velocidade e direção constantes ou que a aceleração é muito baixa. Em outras palavras, sua trajetória é uma linha reta ideal, por exemplo, sem buracos e sem curvas e também a vibração é mínima.
Por que isso é importante ao usar um sensor de inclinação? Os sensores de inclinação baseados em MEMS utilizam a gravidade como a força de ação no elemento de detecção. Uma abordagem típica para um sensor de inclinação MEMS incluiria um acelerômetro de 3 eixos onde a gravidade age em cada eixo individual, dependendo do ângulo de inclinação e os sinais são compensados pela temperatura e linearizados, e o ângulo de inclinação real é calculado a partir dos dados de aceleração tridimensionais. No entanto, qualquer aceleração adicional, por exemplo, mudanças de velocidade do veículo, um buraco (choque) ou curva, leva à distorção da inclinação calculada porque o acelerômetro "vê" a aceleração adicional. Isso é comum em todos os dispositivos baseados em gravidade e pode criar grandes erros.
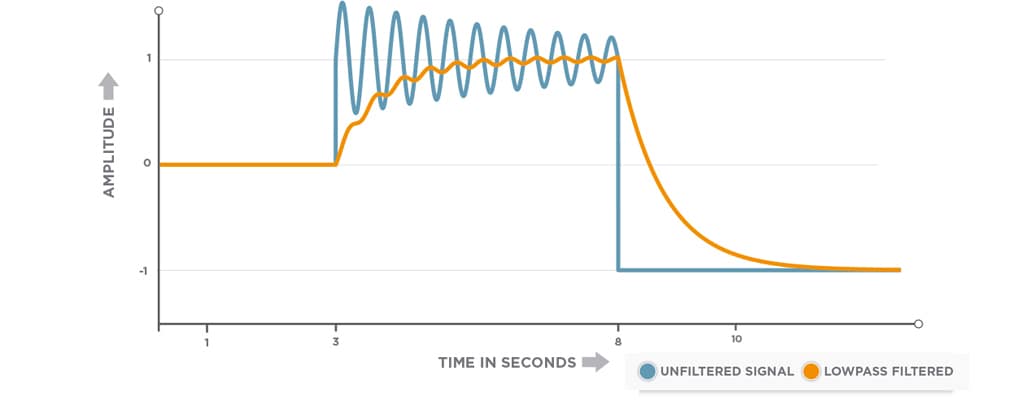
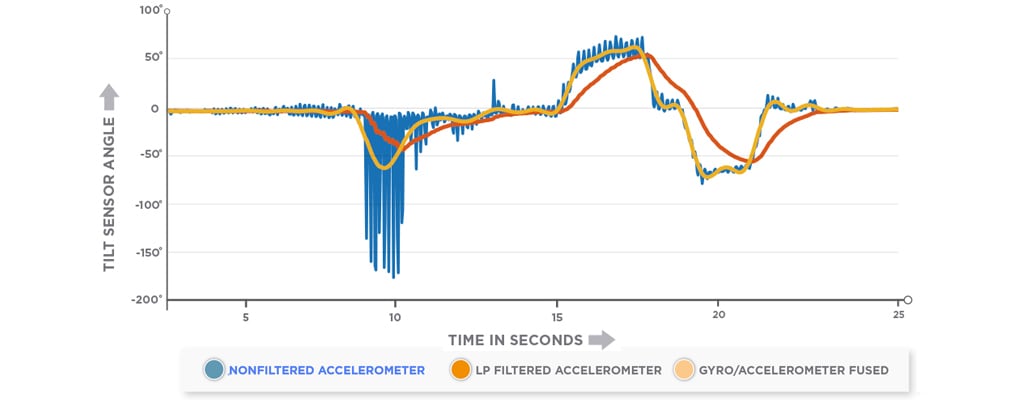
Enquanto os sensores de inclinação MEMS da TE Connectivity (TE) oferecem excelente precisão, melhor do que ±0,15° em temperatura ambiente, a aceleração adicional pode causar erros de até alguns graus. Uma maneira comum de estabilizar a saída é implementar filtros low pass. Todos os sensores de inclinação da TE fazem uso disso. Vibrações e choques moderados são suficientemente amortecidos dessa forma e, em muitas aplicações, isso é suficiente e produz bons resultados. A principal desvantagem do uso de filtros low pass é que eles vêm com um atraso na saída e, devido à sua natureza, a saída não pode acompanhar mudanças rápidas de posição. Isso pode não ser um problema, mas em algumas aplicações é. Em algumas aplicações é necessário ter ambos, um cancelamento de erros induzidos por choque e vibração por um lado e uma saída que acompanhe a verdadeira orientação do veículo, por outro lado. Um sensor baseado em gravidade pura não é uma solução nesse caso, não importa como ele opera ou que tipo de filtragem ou compensação é feito.
FUSÃO DE SENSORES É A CHAVE
Isso significa que informações de diferentes sensores são combinadas para calcular o sinal de saída. Uma combinação de um acelerômetro e um giroscópio é uma abordagem poderosa. O ponto fraco de um sensor é compensado pelo ponto forte do outro.
Um sensor giroscópio mede a taxa de rotação ou velocidade angular em torno de um determinado eixo. Por exemplo, em uma aeronave um giroscópio pode ser usado para medir a taxa de rotação ao redor do eixo de rolagem da aeronave. O giroscópio mediria um valor diferente de zero, desde que a aeronave esteja girando, mas indica zero se o giro parar. Isso significa que um giroscópio de giro em uma aeronave em uma curva coordenada com um banco de 60 graus mede uma taxa de zero, o mesmo que uma aeronave voa em linha reta e nivelada. O ângulo de rolagem atual pode ser aproximado integrando a taxa de rolagem ao longo do tempo, mas não sem algum erro surgindo nesse intervalo. Além disso, o giroscópio flutua ao longo do tempo, de modo que erros adicionais se acumularão ao longo de um período de tempo e, eventualmente, você tem uma ideia imprecisa do seu ângulo de giro atual em relação ao horizonte. Assim, só os sensores giroscópios não podem ser usados para manter uma aeronave ou qualquer veículo ou equipamento em uma orientação particular. Assim, para a maioria das aplicações dinâmicas, você precisa de um acelerômetro e um giroscópio para medir a inclinação e avaliá-la corretamente.
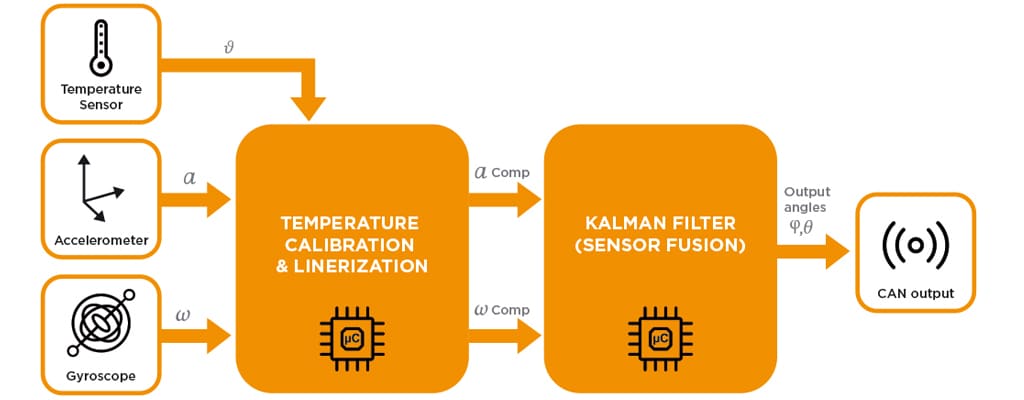
A solução da TE, o AXISENSE-G, é um sensor de inclinação estabilizado por giroscópio que combina um acelerômetro de 3 eixos, um giroscópio e um sensor de temperatura, juntamente com uma MCU sofisticada e uma interface de barramento CAN, tudo em um pacote robusto e compacto. Os algoritmos capturam dados de diferentes sensores, compensam os efeitos de temperatura e os fundem para produzir um sinal de saída de inclinação estabilizado, mas de rastreamento rápido. Existem diferentes maneiras de implementar uma fusão de sinais de sensores.
FILTRO KALMAN
A TE decidiu usar o conhecido filtro Kalman em uma implementação estendida para combinar os dados do sensor e fornecer uma saída precisa e confiável em condições dinâmicas para o sensor de inclinação AXISENSE-G. A filtragem de Kalman, também conhecida como LQE (Linear Quadratic Estimation – Estimativa linear quadrática), é um algoritmo que utiliza uma série de medições observadas ao longo do tempo, contendo ruído estatístico e outras imprecisões, e produz estimativas de variáveis desconhecidas que tendem a ser mais precisas do que aquelas baseadas apenas em uma única medição, estimando uma distribuição de probabilidade conjunta sobre as variáveis para cada período de tempo. O nome do filtro é uma homenagem a Rudolf E. Kálmán, um dos principais desenvolvedores de sua teoria.
AS VANTAGENS
A principal vantagem de estabilizar um sensor de inclinação usando um giroscópio é que isso reduz claramente o efeito negativo da aceleração adicional de curto prazo devido a mudanças de velocidade ou direção, bem como solavancos e vibrações. Às vezes, o termo "IMU" (Inertial Measurement Unit – Unidade de medição inercial) é usado quando se fala de sensores de posição fundidos. A TE não usa essa nomenclatura porque ela geralmente é usada no contexto da navegação, que vem com diferentes requisitos.
O sensor de inclinação AXISENSE-G está focado no amortecimento de efeitos de curto prazo. Como não precisa usar informações de posição globais, como dados de GPS, o sensor é compacto em tamanho, fácil de instalar, fácil de usar, robusto, confiável e muito econômico. Além disso, o sensor de inclinação AXISENSE-G da TE pode substituir diretamente um sensor de inclinação padrão da TE sem giroscópio porque tem o mesmo ajuste, forma e função e utiliza a mesma interface de comunicação do barramento CAN.
Resumo
A tecnologia de sensores de inclinação evoluiu ao longo dos anos, desde projetos mecânicos simples até tecnologias mais sofisticadas com preenchimento líquido que forneceram informações precisas e confiáveis sobre uma ampla gama de ângulos e em mais de um eixo. A tecnologia MEMS permitiu o desenvolvimento e o refinamento adicionais de sensores de inclinação, fornecendo projetos de estado sólido com maior precisão e resolução, bem como projetos mais robustos e confiáveis. A filtragem e a compensação de temperatura proporcionaram uma detecção de inclinação mais precisa em uma gama mais ampla de aplicações, permitindo também seu uso em aplicações mais dinâmicas. No entanto, os sensores de inclinação convencionais nem sempre funcionam bem o suficiente em ambientes com vibrações e choques pesados. Esse problema é resolvido pela fusão de sensores: fusão de dados do acelerômetro e do giroscópio, resultando em uma nova geração de sensores de inclinação que permanecem responsivos em condições dinâmicas, mas são muito menos afetados pela aceleração gerada na aplicação.

A TE Connectivity (TE) oferece o sensor de inclinação de última geração. Usando a compensação de giroscópio, esta poderosa combinação de elementos de sensor de MEMS, juntamente com filtragem avançada, resulta em saídas de sensores de inclinação estáveis e altamente precisas, que podem suportar ambientes dinâmicos e adversos. Assista a este vídeo para saber mais.

