
Informe técnico
El futuro de los sistemas no tripulados
El entorno naval implica desafíos únicos (presión, inundación, corrosión) para alimentar de manera confiable los UUV y USV. Las soluciones de conectividad de TE están diseñadas para abordar estos desafíos.
Autor:
Gregory Powers, exgerente de Desarrollo de Mercado, industria aeroespacial, de defensa y marítima Greg ya no está con TE.
El campo de la robótica abarca todos los entornos conocidos por el hombre: mar, tierra, aire y espacio. Muchos están familiarizados con los vehículos aéreos no tripulados (UAV) o sondas espaciales y rovers planetarios , cuando piensan en sistemas no tripulados. Más allá de los UAV, también hay vehículos submarinos no tripulados (UUV) y buques de superficie no tripulados (USV), que han comenzado a acaparar titulares en relación con la seguridad y la defensa. Del mismo modo, los vehículos terrestres no tripulados (UGV) ahora están ganando su parte del centro de atención. Incluso, la Marina de los Estados Unidos está experimentando con un robot humanoide (SAFFiR) para ayudar a combatir los incendios a bordo como servicio de primera respuesta.
La mayoría de los UAV utilizan enlaces de datos ligeros y, por lo general, tienen un entorno sin obstáculos para conversar en tiempo real con las estaciones receptoras.
Cada uno de estos sistemas no tripulados está destinado a operar en un entorno y ecosistema donde una máquina puede aumentar o reemplazar a un humano. Las razones incluyen seguridad, preocupaciones ambientales, superioridad tecnológica o costos. Enviar un vehículo no tripulado puede ser menos peligroso y menos costoso que enviar a un humano. Los requisitos de la aplicación impulsan la tecnología de los bloques de construcción electromecánicos utilizados para crear el robot y estas soluciones pueden variar desde lo mundano hasta lo extremo. Existen paradigmas tecnológicos y económicos notables asociados con cada misión que llevan a los ingenieros a seleccionar soluciones de conectividad específicas.
UAV: SwaP y ancho de banda
Ya sean lanzados desde el hombro o desde el portador, los UAV tienen que ver con SWaP (tamaño, peso, potencia) y ancho de banda. La construcción ligera, incluidas las soluciones de conectividad, es primordial para permitir la carga útil, el alcance y el tiempo en la estación máximos. Si bien el procesamiento de señales de alta velocidad es importante en la vigilancia y las aplicaciones similares, el ancho de banda de comunicación se maneja de manera más conveniente en los UAV que en otros vehículos no tripulados. La mayoría de los UAV utilizan enlaces de datos ligeros y, por lo general, tienen un entorno sin obstáculos para conversar en tiempo real con las estaciones receptoras. Como resultado de su entorno, los UAV se benefician de equipos de distribución de energía ligeros y de alta capacidad. Los cables y los componentes del arnés se han vuelto más ligeros a lo largo de los años. El aislamiento reticulado y los materiales de revestimiento permiten espesores de pared significativamente más delgados, lo que ahorra espacio y peso. Dado que cada gramo cuenta, TE Connectivity (TE) introdujo recientemente botas termorretráctiles livianas que son hasta un 20 por ciento más livianas que las piezas que pueden reemplazar. En muchos casos, la conectividad de fibra óptica se ha implementado como el ejemplo de bajo peso, alto ancho de banda e inmunidad EMI.
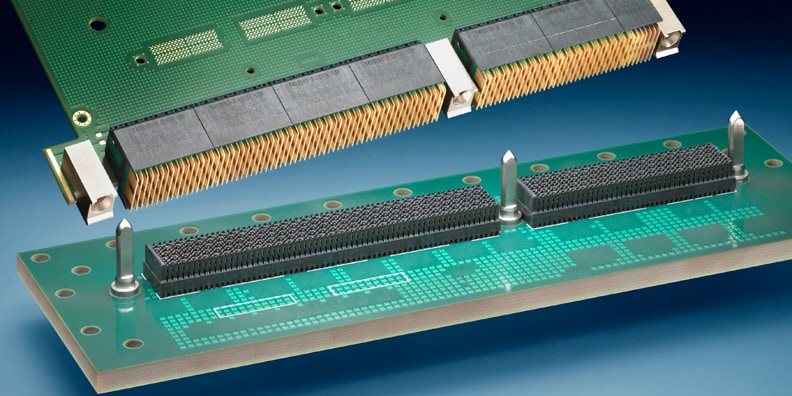
El procesamiento local de imágenes e inteligencia de señales permite al UAV tamizar y priorizar los datos que se transmitirán a la estación receptora. Con el procesamiento sofisticado viene la necesidad de computación integrada de alta velocidad. El conector de placa base VITA 46 VPX estándar MULTIGIG RT 2-R de TE (Figura 1) es adecuado para esta función. El conector VPX de arquitectura abierta es modular y escalable para la flexibilidad de la aplicación y se ha demostrado que supera los 10 Gb/s para una excelente densidad funcional. Los diseñadores de UAV también se están beneficiando de los avances en metalización compuesta y selectiva para crear recintos y antenas compuestos integrados.
UGV: resistentes y orientados a los costos
Tradicionalmente, el diseño de UGV ha apuntado a costos más bajos como una alta prioridad. Las razones incluyen el número potencialmente alto de unidades producidas, la naturaleza menos desafiante del entorno terrestre y el hecho de que los UGV, a menudo, se consideran prescindibles. Sin embargo, se espera que los UGV sean resistentes y funcionen cuando sea necesario, lo que lleva a los diseñadores a pisar una delgada línea entre el costo y el rendimiento. Los UGV van desde rovers pequeños y económicos que pueden tener una cámara u otro sensor hasta sistemas multifunción de alta capacidad. Dada la amplia gama de estas plataformas, las soluciones de conectividad van desde conectores comerciales, industriales o automotrices hasta conectores de especificaciones militares. En cada caso, las soluciones de conectividad deben diseñarse adecuadamente para adaptarse a la aplicación.
Los vehículos como Humvees y camiones para apoyar la logística están siendo diseñados para operar en modo tripulado o no tripulado.
En un extremo están los sistemas relativamente básicos, de bajo costo y potencialmente prescindibles. Los vehículos como Humvees y camiones para apoyar la logística están siendo diseñados para operar en modo tripulado o no tripulado. Pueden usar conectores automotrices resistentes a la intemperie, conectores de entrada/salida IP67 y conectores circulares militares o de estilo militar. Los conectores MIL-DTL-38999 y sus parientes cercanos siguen siendo una de las opciones más populares para la interconexión resistente. Más allá de un conector completo calificado para uso militar, una gran variedad de conectores utilizan la carcasa familiar 38999 como factor de forma básico. La nueva generación de conectores circulares COTS de estilo militar es ideal para UGV. Por ejemplo, los conectores Wildcat Micro y 38999 de TE se basan en la práctica de diseño de conectores circulares militares. Con entre 3 y 9 contactos, el mecanismo de enganche de bayoneta Wildcat Micro es muy resistente y permite un acoplamiento rápido y positivo. También está disponible una opción de acoplamiento roscado de arranque triple antivibración, así como varias opciones de montaje y accesorios traseros.

Basados en Mil-DTL-38999, los conectores Wildcat 38999 están disponibles en cuatro tamaños de carcasa con entre 11 y 64 contactos y ofrecen casi el doble de densidad de contacto que los conectores 38999 tradicionales. La rosca de acoplamiento de arranque triple proporciona un acoplamiento resistente y de alta fiabilidad para ayudar a soportar golpes y vibraciones severas y los conectores están completamente sellados, una característica vital para la operación en cualquier clima o la posible inmersión durante una misión. Más allá de la resistencia y la alta densidad, muchos sistemas de sensores que se encuentran en sistemas no tripulados demandan ancho de banda. El conector CeeLok FAS-X de TE admite Ethernet de 10 Gb/s en una carcasa 38999, con capacidad para un solo canal Ethernet en una carcasa de tamaño 11 o cuatro canales en una carcasa de tamaño 25. Una ventaja de los conectores derivados de 38999 es que pueden usar las mismas carcasas posteriores y otros accesorios fácilmente disponibles.
UUV: entorno desafiante
El entorno naval trae desafíos únicos, particularmente en términos de soportar las presiones submarinas, operar en un entorno inundado y proteger contra la corrosión inducida por la sal. A menudo, la electrónica se aloja en recipientes de contención o unidades reemplazables en línea (LRU). Sujetos a los efectos de la hidrodinámica, los UUV que se espera que operen a una velocidad de avance significativa, a menudo, tienen una sección transversal frontal mínima o tienen forma de torpedo y el espacio es muy escaso. La necesidad de rendimiento bajo el agua, así como el espacio y las densidades más altas que ahorran peso, con frecuencia, están en conflicto. Dados los desafíos de empaquetado resultantes, los conectores resistentes de factor de forma pequeño, como los conectores SEACON MINI-CON de acoplamiento en seco de TE, funcionan bien en el entorno UUV. Los conectores SEACON MINI-CON de TE se desarrollaron como un sistema de alta presión, alta densidad y diámetro pequeño, disponible en 13 tamaños de carcasa y hasta 203 contactos. El conector estándar soporta 16 000 psi, aunque hay versiones de mayor presión disponibles.

Los conectores de acoplamiento húmedo tienden a ser más grandes, ya que necesitan tanto un equilibrio de presión como un mecanismo para sellar los contactos del conector no acoplados. También necesitan una entrada generosa para permitir el acoplamiento adecuado de las mitades del conector, desde el punto de vista robótico, por un UUV en un entorno submarino. Si bien los conectores de acoplamiento húmedo se han utilizado durante mucho tiempo en la producción de petróleo submarino, también pueden encontrar uso en aplicaciones navales, como un sistema de acoplamiento submarino para UUV. Sigue siendo necesario crear vehículos submarinos autónomos. Los vehículos operados remotamente utilizados en aplicaciones de petróleo y gas se controlan directamente a través de un cable umbilical largo para alimentación, control y datos. Las líneas de alimentación y los cables de fibra óptica en el cable umbilical proporcionan energía y ancho de banda adecuados. Sin embargo, el alcance, la libertad y el sigilo de los vehículos conectados a distancia (ROV) pueden ser problemáticos en aplicaciones de defensa.
Cada entorno (mar, tierra, aire y espacio) plantea sus propios obstáculos y tiene un profundo efecto en el diseño del sistema no tripulado.
La operación autónoma sin ataduras puede crear su propio conjunto de problemas, incluidos los medios de comunicación y el suministro de energía. Un vehículo bajo el agua no tiene las mismas capacidades de comunicación inalámbrica convenientes que un UAV o UGV. El agua no transmite bien las señales de RF. Si bien las comunicaciones acústicas o las antenas remolcadas de baja frecuencia permiten cierto grado de comunicaciones, no son eficientes para cargas útiles de datos más altas. Un uso común de las señales acústicas es simplemente decirle al UUV que salga a la superficie para enviar o recibir comunicaciones. Una vez en la superficie, el UUV tiene capacidades de comunicación claras, ya sea con buques cercanos o con satélites. Como consecuencia de los problemas de comunicaciones, muchos UUV no realizan un procesamiento intenso de la señal a bordo. A diferencia del procesamiento de señal pesada realizado por un UAV para obtener fotos y videos de alta resolución, las necesidades de un UUV tienden a ser más humildes. Si la computadora integrada está bien protegida del agua y la presión, su entorno operativo es relativamente benigno, sin el choque y la vibración que experimentan los UAV y los UAV. Los sistemas informáticos integrados COTS proporcionarán la potencia de procesamiento requerida, la resistencia mecánica y ambiental requerida. Se requieren conectores sellados entre el entorno protegido y el resto del UUV. La fuente de alimentación en los UUV suele ser por batería. Lo último en tecnología de baterías, así como la distribución eficiente de energía y los sistemas de bajo consumo de energía son vitales para el alcance y el éxito de la misión. Minimizar SWaP es un tema común en el diseño de sistemas no tripulados.
Mundo no tripulado
A medida que evolucionan los sensores, el software y las tecnologías de procesamiento, también lo harán la efectividad y la presencia de sistemas robóticos no tripulados. Una cosa que no va a cambiar son los desafíos ambientales que enfrentan los sistemas robóticos. Cada entorno (mar, tierra, aire y espacio) plantea sus propios obstáculos y tiene un profundo efecto en el diseño del sistema no tripulado. Estos desafíos van desde el más básico, por ejemplo, la selección de materiales, hasta el nivel más alto, como el nivel de autonomía requerido. Del mismo modo, el papel de la conectividad y la gama de soluciones disponibles para el diseñador se ve afectado por el entorno del sistema no tripulado. A medida que la ciencia de la interconexión fusiona forma y función, el papel de la conectividad continuará aumentando en importancia en el futuro del diseño de sistemas no tripulados.
