
Informe técnico
Fusión de sensores en sensores de inclinación
Obtén información sobre el importante papel que desempeña la fusión de sensores en la nueva generación de sensores de inclinación en este informe técnico.
INTRODUCCIÓN
Un sensor de inclinación o pendiente proporciona información de inclinación angular en relación con la fuerza gravitacional. Esta información se puede utilizar para supervisar el estado del equipo o para controlar las características de un dispositivo o vehículo. También se utilizan diferentes tipos de sensores en diferentes aplicaciones. Los sensores de inclinación de montaje en superficie de bajo costo se están volviendo cada vez más populares en la tecnología portátil. Se utilizan para monitorear el ángulo en el que se sostiene un teléfono para la función de rotación automática. Otro ejemplo es el uso de sensores de inclinación en consolas de juegos.
Los sensores de inclinación robustos se utilizan en una amplia gama de maquinaria industrial, así como en una gama de vehículos y equipos de construcción dentro y fuera de la carretera. Estos sensores se utilizan para una variedad de funciones que incluyen control de conducción, nivelación de la cabina, medición del ángulo de la pluma, así como protección de vuelco. Los requisitos de seguridad se están agregando en una gama de vehículos y equipos de construcción que requieren sensores para monitorear la inclinación o pendiente para garantizar la seguridad del operador y de los que están cerca.
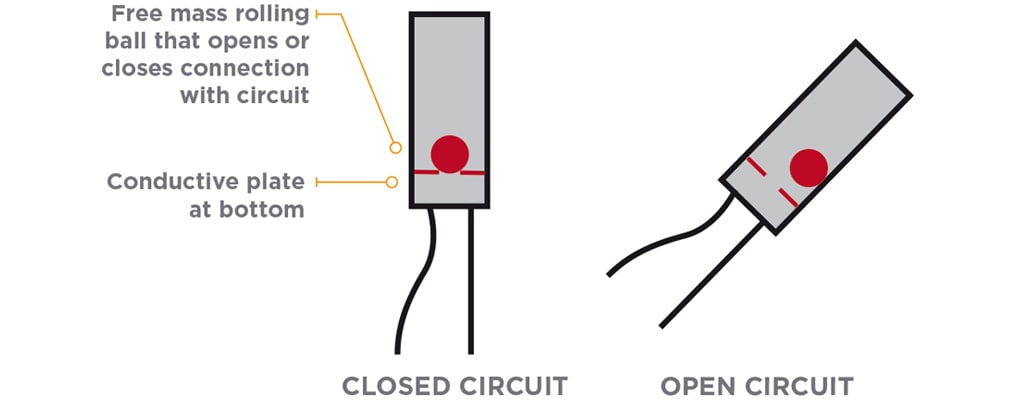
La tecnología para sensores de inclinación ha evolucionado a lo largo de los años desde simples interruptores de inclinación hasta sofisticados sensores totalmente electrónicos que combinan múltiples tecnologías de detección. Hace muchos años, estos dispositivos no eran sensores sino interruptores que consistían en una bola rodante con placa conductora por debajo. Los interruptores fueron diseñados de tal manera que un nivel suficiente de inclinación permitiría que la bola rodara hacia el fondo y formara una conexión eléctrica con la placa y esa señal podría usarse como indicador o podría usarse para encender o apagar algo.
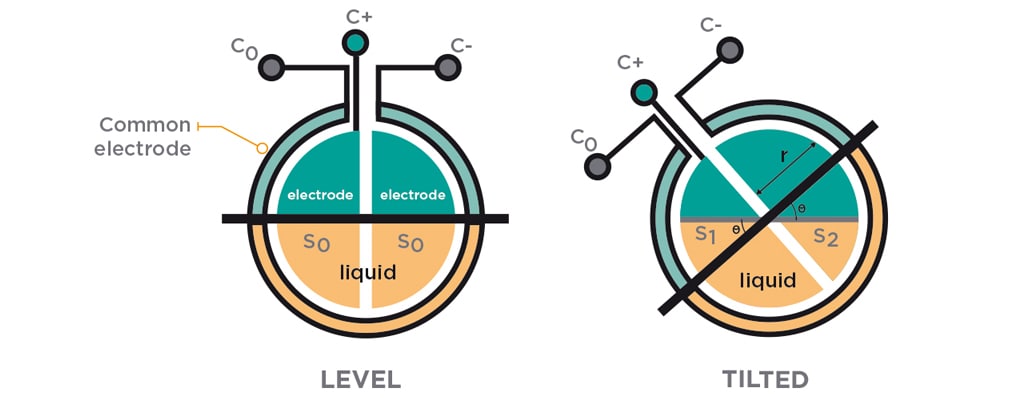
Los primeros sensores de inclinación contenían líquidos resistivos o capacitivos dentro de una cavidad sellada. A medida que la cápsula se inclina de extremo a extremo, el líquido fluye hacia un lado u otro, lo que cambia la resistencia o la capacitancia de un circuito interno y la salida del circuito podría monitorearse directamente, o la salida podría amplificarse o traducirse a otros formatos de salida. Si bien estos sensores podían proporcionar datos de inclinación precisos y confiables en muchas aplicaciones, tenían varias debilidades, incluida la respuesta lenta en el tiempo, la susceptibilidad a la vibración y el chapoteo y la vida útil limitada.
LOS SENSORES MODERNOS DE INCLINACIÓN O PENDIENTE SUELEN UTILIZAR TECNOLOGÍA DE SISTEMAS MICROELECTROMECÁNICOS (SMEM).
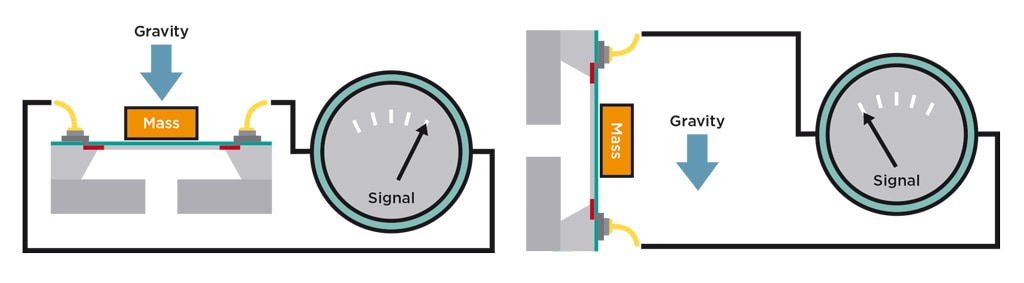
Los SMEM de estado sólido son sensores pequeños, ya que consisten en placas de masa móviles a prueba que se unen a un marco de referencia a través de un sistema de suspensión mecánica. Esta es una técnica de combinación de componentes mecánicos y eléctricos juntos en un chip para generar un sistema con dimensiones en miniatura. Para un sensor de inclinación basado en SMEM, se agrega una masa a la matriz de silicio del sensor. En la posición horizontal, la fuerza de la gravedad desvía el troquel (como la aplicación de presión) y produce una salida eléctrica. A medida que el troquel se gira a la posición vertical, la fuerza en el troquel va a cero, al igual que la salida eléctrica. La salida es un número de complemento a dos de 16 bits que representa el ángulo de inclinación en grados. El sensor de inclinación basado en SMEM resolvió muchos de los problemas con las tecnologías basadas en líquidos.
La función y la precisión de un sensor de inclinación se ven afectadas por muchos factores. Algunos de estos factores son la gravedad, la temperatura, la calibración del sensor de inclinación, la linealidad y la sensibilidad del eje cruzado. Algunas de las especificaciones clave de un sensor de inclinación:
- Número de ejes: El número de ejes es un factor importante, ya que varía de una aplicación a otra. En robótica, se utiliza un sensor de inclinación de doble eje. En los controladores de videojuegos y joysticks, se requiere un sensor de inclinación de tres ejes. En algunos teléfonos inteligentes, se utilizan sensores de cuatro ejes.
- Resolución: La inclinación mínima detectada y la salida por el sensor
- Rango de medición: El rango de inclinación que puede manejar el sensor. Algunos sensores son capaces de realizar mediciones de solo 10°, mientras que otros pueden cubrir un rango de hasta 60°, 75° o incluso 90°.
- Tolerancia al ruido: El ruido tiende a causar distorsiones armónicas en la función del sensor, lo que resulta en una variación de la salida y una reducción de la eficiencia del sistema.
- Vibraciones y golpes: Las vibraciones pueden interrumpir la funcionalidad del sensor y, por lo tanto, se requieren medidas de resistencia a las vibraciones, especialmente cuando los sensores se utilizan en condiciones adversas; por ejemplo, en vehículos todoterreno o en obras de construcción.
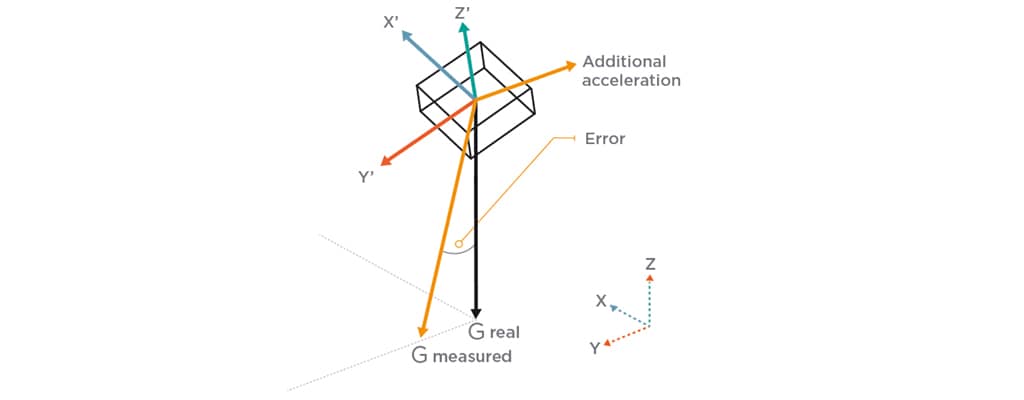
Además, es importante diferenciar entre aplicaciones (cuasi) estáticas y dinámicas. En una aplicación dinámica, el sensor está influenciado por una aceleración adicional, mientras que en aplicaciones estáticas o de cámara lenta, generalmente se pueden descuidar. Para la detección de inclinación estática, las tecnologías de detección que se utilizan comúnmente se basan de manera estricta en la gravedad, por ejemplo.
- Acelerómetros, que en general son de tipo SMEM en la actualidad
- Elementos llenos de líquido, conductores o no conductores con lectura electrónica
- cavidad de convección con calentador
- Péndulo con codificador o potenciómetro
La condición estática significa que el vehículo no se está moviendo o el vehículo se está moviendo a velocidad constante y la dirección o aceleración es muy baja. En otras palabras, su trayectoria es una línea recta ideal, por ejemplo, sin baches y sin curvas y también la vibración es mínima.
¿Por qué es esto importante cuando se utiliza un sensor de inclinación? Los sensores de inclinación basados en SMEM utilizan la gravedad como la fuerza de acción sobre el elemento sensorial. Un enfoque típico para un sensor de inclinación SMEM incluiría un acelerómetro de 3 ejes donde la gravedad actúa sobre cada eje individual dependiendo del ángulo de inclinación y las señales se compensan y alinean la temperatura y el ángulo de inclinación real se calcula a partir de los datos de aceleración 3D. Sin embargo, cualquier aceleración adicional, por ejemplo, cambios de velocidad del vehículo o un bache (choque) o curva, conduce a la distorsión de la inclinación calculada porque el acelerómetro "ve" la aceleración adicional. Esto es común para todos los dispositivos basados en la gravedad y puede crear grandes errores.
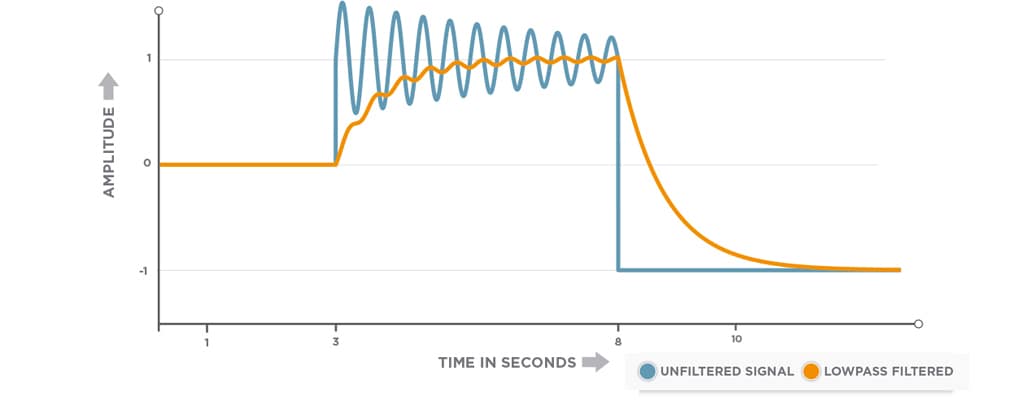
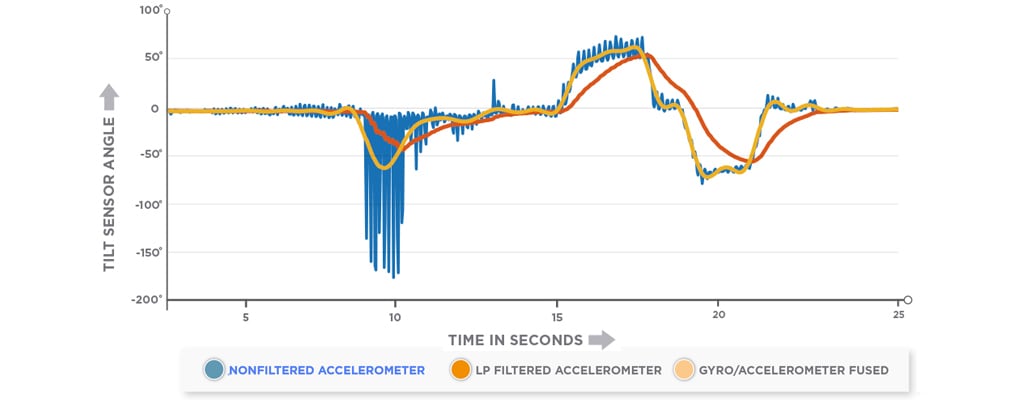
Si bien los sensores de inclinación SMEM de TE Connectivity ofrecen una excelente precisión mejor que ±0.15° a temperatura ambiente, la aceleración adicional puede causar errores de hasta unos pocos grados. Una forma común de estabilizar la salida es implementar filtros de paso bajo. Todos los sensores de inclinación TE hacen uso de esto. Las vibraciones moderadas y los golpes se amortiguan lo suficiente de esta manera y, en muchas aplicaciones, esto es suficiente y produce buenos resultados. El principal inconveniente de usar filtros de paso bajo es que viene con un retraso en la salida y, debido a su naturaleza, la salida no puede seguir cambios rápidos de posición. Esto puede no ser un problema, pero en algunas aplicaciones lo es. En algunas aplicaciones es necesario contar con ambos, una cancelación de errores inducidos por choques y vibraciones por un lado y una salida que siga la verdadera orientación del vehículo por otro lado. Un sensor basado en la gravedad pura no es una solución en este caso, sin importar cómo funcione o qué tipo de filtrado o compensación se realice.
LA FUSIÓN DE SENSORES ES LA CLAVE
Esto significa que la información de diferentes sensores se combina para calcular la señal de salida. Una combinación de un acelerómetro y un giroscopio es un enfoque poderoso. La debilidad de un sensor se compensa con la fuerza del otro.
Un sensor giroscópico mide la velocidad de rotación o la velocidad angular alrededor de un eje en particular. Por ejemplo, en una aeronave se puede utilizar un giroscopio para medir la velocidad de rotación alrededor del eje de balanceo de la aeronave. El giroscopio mediría un valor distinto de cero siempre que la aeronave esté rodando, pero indica cero si el balanceo se detiene. Esto significa que un giroscopio de balanceo en una aeronave en un giro coordinado con un banco de 60 grados mide una tasa de cero, igual que una aeronave vuela recta y nivelada. El ángulo de balanceo actual se puede aproximar integrando la velocidad de balanceo a lo largo del tiempo, pero no sin que se produzca algún error. Además, el giroscopio se desplaza con el tiempo, por lo que se acumularán errores adicionales durante un período de tiempo y, finalmente, tendrá una idea inexacta de su ángulo de balanceo actual en relación con el horizonte. Por lo tanto, los girosensores por sí solos no se pueden usar para mantener una aeronave o cualquier vehículo o equipo en una orientación particular. Por lo tanto, para la mayoría de las aplicaciones dinámicas, necesita tanto un acelerómetro como un giroscopio para medir la inclinación y evaluarla correctamente.
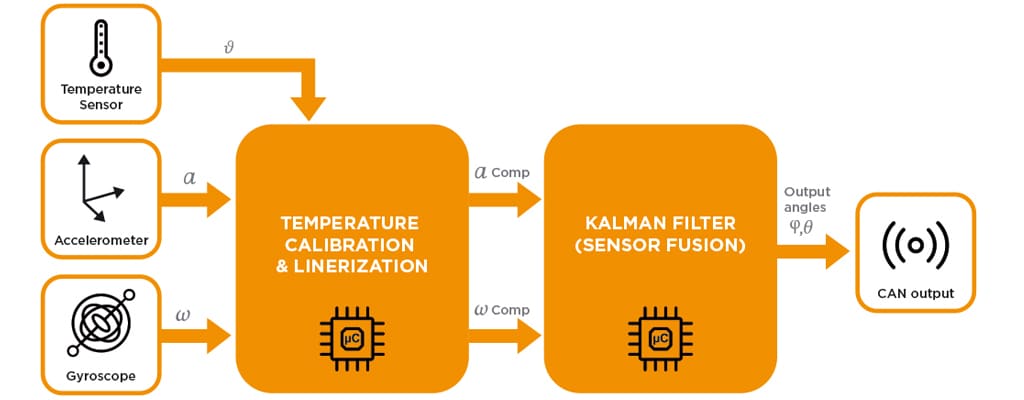
La solución de TE, el AXISENSE-G, es un sensor de inclinación giroestabilizado que combina un acelerómetro de 3 ejes, un giroscopio y un sensor de temperatura junto con un sofisticado MCU y una interfaz CAN-bus, todo en un paquete robusto y compacto. Los algoritmos toman datos de diferentes sensores, compensan los efectos de la temperatura y los fusionan para producir una señal de salida de inclinación estabilizada pero de seguimiento rápido. Existen diferentes formas de implementar una fusión de señales de sensores.
FILTRO KALMAN
TE decidió utilizar el conocido filtro Kalman en una implementación extendida para combinar los datos del sensor y proporcionar una salida precisa y confiable en condiciones dinámicas para el sensor de inclinación AXISENSE-G. El filtrado de Kalman, también conocido como estimación cuadrática lineal (LQE), es un algoritmo que utiliza una serie de mediciones observadas a lo largo del tiempo, que contienen ruido estadístico y otras inexactitudes, y produce estimaciones de variables desconocidas que tienden a ser más precisas que las basadas en una sola medición, mediante la estimación de una distribución de probabilidad conjunta sobre las variables para cada marco de tiempo. El filtro lleva el nombre de Rudolf E. Kálmán, uno de los principales desarrolladores de su teoría.
BENEFICIOS
El principal beneficio de estabilizar un sensor de inclinación mediante el uso de un giroscopio es que esto reduce claramente el efecto negativo de la aceleración adicional a corto plazo debido a los cambios en la velocidad o la dirección, así como a los golpes y la vibración. A veces se utiliza el término "UMI" (unidad de medida inercial) cuando se habla de sensores de posición fusionados. TE no utiliza esta redacción porque generalmente se usa en el contexto de la navegación, que viene con diferentes requisitos.
El sensor de inclinación AXISENSE-G se centra en la amortiguación de los efectos a corto plazo. Como no necesita usar información de posición global, como datos GPS, el sensor es de tamaño compacto, fácil de instalar, fácil de usar, resistente y confiable y muy competitivo en costos. Además, el TE sensor de inclinación AXISENSE-G TE de TE puede reemplazar directamente un sensor de inclinación TE estándar sin giroscopio porque tiene el mismo ajuste, forma y función y utiliza la misma interfaz de comunicación CAN-Bus.
Resumen
La tecnología de sensores de inclinación ha evolucionado a lo largo de los años, desde diseños mecánicos simples hasta tecnologías más sofisticadas llenas de líquido que proporcionaron información de inclinación precisa y confiable en una amplia gama de ángulos y en más de un eje. La tecnología SMEM permitió un mayor desarrollo y refinamiento de los sensores de inclinación que proporcionan diseños de estado sólido con mayor precisión y resolución, así como diseños más resistentes y confiables. El filtrado y la compensación de temperatura proporcionaron una detección de inclinación más precisa en una gama más amplia de aplicaciones, además de permitir su uso en aplicaciones más dinámicas. Sin embargo, los sensores de inclinación convencionales no siempre funcionan lo suficientemente bien en entornos con fuertes vibraciones y golpes. Este problema se aborda mediante la fusión de sensores: la fusión de datos de acelerómetros y giroscopios, lo que resulta en una nueva generación de sensores de inclinación que permanecen receptivos en condiciones dinámicas, pero se ven mucho menos afectados por la aceleración generada en la aplicación.

TE Connectivity (TE) ofrece el sensor de inclinación de próxima generación. Utilizando la compensación del giroscopio, esta poderosa combinación de elementos de detección MEMS, junto con el filtrado avanzado, da como resultado salidas del sensor de inclinación estables y altamente precisas, que pueden soportar entornos dinámicos y hostiles. Vea este video para obtener más información.

