Desarrollo de un sistema de transporte móvil autónomo
RESUMEN
Los robots móviles autónomos están desempeñando un papel importante en el transporte flexible de materiales. El robot móvil desarrollado basado en la Localización y mapeo simultáneo (SLAM) es totalmente capaz de construir mapas, encontrar caminos y su optimización, así como evitar obstáculos y es más flexible y ágil para automatizar la logística de la fábrica para la transformación digital en almacenamiento automático y transporte de materiales. Hemos investigado en las aplicaciones de las tecnologías de navegación con los robots móviles y hemos desarrollado soluciones desde una perspectiva estratégica para automatizar los procesos de la araña de agua.
PLANTEAMIENTO DEL PROBLEMA
El enfoque convencional de transporte de materiales es utilizar la araña de agua para transportar materiales desde el supermercado o bodega de materiales hasta las áreas de producción. La Fig.1 ilustra un proceso general de araña de agua con el operador para empujar/tirar de un remolque cargado con cajas de materiales en una planta de TE. Normalmente, los materiales no se transportan directamente a las líneas de producción, sino primero a un área de amortiguación, como se muestra en la Fig.2. Las líneas de producción recogen los materiales del área de amortiguamiento y una vez comprobados sin una cantidad suficiente de materiales para apoyar la producción durante las próximas dos o más horas, la línea de producción pondría una etiqueta en el área de amortiguamiento para notificar la solicitud de materiales. Los cuidadores de materiales verifican la disponibilidad de materiales en el área de amortiguamiento una vez que ven/reciben la solicitud de material, los cuidadores de materiales ayudarían a solicitar materiales del supermercado o bodega de materiales, con una araña de agua asignada para transportar los materiales. Obviamente, el enfoque convencional requiere mucha mano de obra y tiene poca eficiencia. Además, generalmente hay muchos tipos diferentes de materiales para administrar y se necesita un poco de esfuerzo para encontrar/localizar materiales, lo que afecta aún más la eficiencia del transporte de materiales. Lo que es peor, la araña de agua manual podría no responder a la solicitud de transporte de materiales a tiempo, lo que podría hacer que las líneas de producción esperen a que lleguen los materiales y con ello afecten la productividad de las líneas de producción.
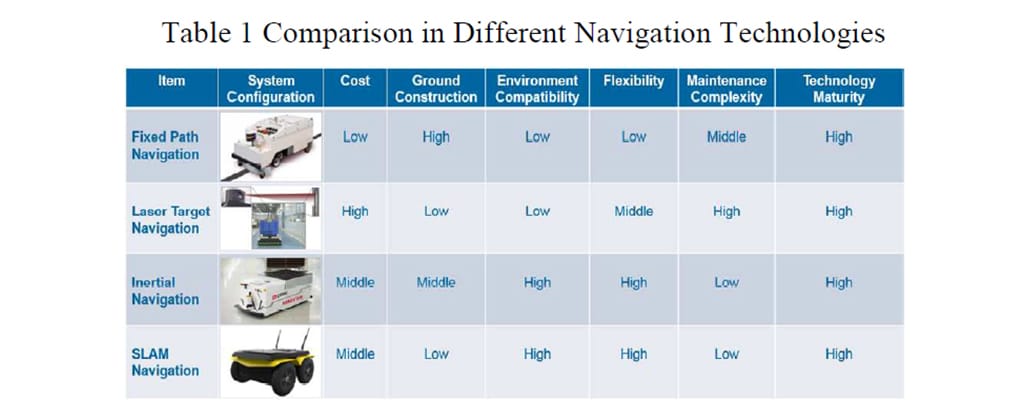
La automatización y la transformación digital ayudarían en gran medida a mejorar la eficiencia del transporte de materiales y reducir el tiempo de respuesta. Los robots móviles autónomos que pueden moverse de forma autónoma y mejorarse con conexiones digitales a las líneas de producción y los sistemas MES, son excelentes alternativas para reemplazar a las arañas de agua manuales. En general, hay cuatro tipos diferentes principales de tecnologías de navegación: navegación de ruta fija, navegación de destino láser, navegación inercial y navegación SLAM, como se muestra en la Tabla 1. El método de navegación de ruta fija, que requiere construir cintas magnéticas para pegar en el piso para guiar al robot móvil a seguir, tiene la movilidad y flexibilidad más bajas; la navegación láser de objetivos, que se basa en Laser Target para reflejar el rayo láser posterior al robot para una localización precisa del robot, es baja en compatibilidad en el entorno y una vez que la posición de Laser Target se cambia o bloquea por otros obstáculos, sería muy difícil navegar por el robot móvil con precisión; la navegación inercial, que requiere construir el piso instalando clavos magnéticos o pegando códigos QR, tiene una mejor compatibilidad con el cambio de diseño del entorno, pero solo es accesible a las áreas que se construyen con clavos magnéticos o códigos QR; la navegación SLAM, que es totalmente capaz de actualizar el mapa en tiempo real para la búsqueda de caminos, la evitación de obstáculos y la navegación autónoma, tiene la mayor compatibilidad con el entorno y la flexibilidad para moverse de forma autónoma y es una tecnología de navegación óptima para el transporte flexible de materiales en las áreas de producción que tiene interacciones frecuentes con humanos u otros dispositivos móviles. La Tabla 1 hace una comparación entre diferentes tecnologías de navegación. Nuestra dirección es desarrollar sistemas de transporte móvil autónomo basados en la navegación SLAM para TE.
MÉTODOS Y RESULTADOS
Tecnología de navegación de última generación en robots móviles
La navegación, que se basa en la localización y la percepción del entorno, es un tema de investigación de alto nivel en robótica. En general, un planificador de ruta global es bueno para producir una ruta optimizada, pero pobre para reaccionar ante obstáculos desconocidos. Incontrast, un método de navegación local/reactivo funciona bien en entornos dinámicos e inicialmente desconocidos, pero es ineficiente, especialmente en entornos complejos[1]. Esta investigación estudia los algoritmos de planificación de rutas globales y locales y propone el método de navegación híbrida.
La planificación global de caminos ha sido bien estudiada en el área académica y aplicada en muchos casos prácticos. El algoritmo basado en grafos es una rama comúnmente utilizada entre ellos, como el gráfico Dijkstra[2], A*[3] y Voronoi[4] que generalmente se usan en un área acotada. Los métodos de Campo Potencial Artificial (APF)[5] utilizan más información del entorno y son adecuados en la navegación en tiempo real.
Sin embargo, las trayectorias generadas por APF generalmente no son óptimas. El proceso de decisión de Markov es un método probabilístico en el que la decisión solo se refiere al último estado y no tiene nada que ver con otros estados anteriores. Además, se discuten algunos otros algoritmos de planificación de rutas globales [6] para descubrir el camino para alcanzar la meta.
La planificación de caminos locales se ocupa de evitar obstáculos en un entorno local. El control predictivo de modelos (MPC) [7] se aplica cada vez más en la navegación de los robots móviles autónomos debido a su resistencia y convergencia en la planificación de rutas. La idea clave de MPC es predecir el futuro con un modelo personalizado para hacer la planificación de rutas y luego aplicar el control inicial correspondiente a la trayectoria elegida para el robot móvil. El enfoque dinámico de ventanas (DWA)[8], que evalúa cada trayectoria y selecciona la que tiene la puntuación más alta, no solo es un algoritmo independiente, sino también un componente de MPC. Sin embargo, DWA supone que todos los obstáculos son estáticos, lo que no es aplicable para evitar obstáculos dinámicos con una velocidad relativamente alta. Los algoritmos como el obstáculo de velocidad y los conos de colisión dan por hecho que los obstáculos se mueven con velocidad y aceleración deterministas.
Obviamente, en la mayoría de las plantas de TE, hay diseños relativamente estáticos en los equipos y líneas de producción con entornos conocidos y también movimientos impredecibles de operadores de dispositivos, que se consideran los obstáculos dinámicos, ni la planificación de rutas globales ni los enfoques de planificación de rutas locales funcionarían bien para las navegaciones de los robots móviles. Es necesario desarrollar un método híbrido con planificador de ruta local combinado y planificador de ruta global para realizar la navegación.
Bases de la navegación autónoma: Construcción de mapas
Cuando el robot móvil autónomo se despliega en un entorno desconocido para encontrar de forma autónoma la manera de alcanzar la meta, el robot tiene que atravesar todo el entorno hasta lograr el objetivo. Si bien se agregan y establecen algunos objetivos nuevos, no es prudente ordenar al robot que atraviese cada vez, lo que es un alto costo del tiempo de cómputo y el espacio de almacenamiento.
Además, el objetivo suele ser una posición relativa con respecto al robot móvil mientras navega por todo el entorno. Por lo tanto, es importante emplear un descriptor ambiental, por ejemplo el mapa, para registrar y describir la información del entorno para que el robot sepa dónde está y a dónde ir exactamente. Hay diferentes variaciones
Para el mapa, como el mapa de entidades, el mapa de topología, el mapa de agarre y el método basado en apariencia. Feature Map, que describe el entorno con puntos clave, líneas o planos, contribuye a una visualización animada.
El mapa de topología describe los nodos y la conectividad del entorno. El método basado en la apariencia calcula directamente la pose de los robots. Grid Map tiene en cuenta tanto la simplicidad como la visualización en la representación del entorno. Por lo tanto, Grid Map es una opción óptima como descriptor ambiental para la navegación de los robots móviles. En esta sección se estudia el enfoque para mapear la construcción de un entorno desconocido para obtener un mapa de agarre.
Sin un conocimiento previo del entorno, la localización y mapeo simultáneo (SLAM), que construye el mapa del entorno desconocido mientras rastrea la pose del robot simultáneamente, juega un papel vital en la construcción de mapas. En nuestro método, se utiliza el filtro de partículas Rao-Blackwellized para SLAM con el fin de garantizar la resistencia y la calidad del mapeo. Uno de los algoritmos de filtrado de partículas más comunes es el filtro de muestreo por importancia de muestreo (SIR). El proceso de mapeo con el filtro SIR Rao-Blackwellized se descompone en los siguientes pasos:
- Muestreo: la pose actual del robot xt(i) se calcula con la última pose del robot xt-1(i) por la distribución de la propuesta π(xt|z1:t,u0:t)
- Ponderación de importancia: cada partícula se formula sobre su propia ponderación, según lo descrito por Eq.(1)

- Remuestreo: para evitar las partículas infinitas y asegurar la convergencia del algoritmo, se debe reducir la cantidad de partículas y las partículas de ponderaciones de baja importancia se sustituyen por las de alta para el proceso de remuestreo.
- Estimación de mapas: El mapa actual mt(i) se estima con las observaciones históricas z1:t y plantea x1:t.
Por lo tanto, la idea principal del filtro de partículas Rao-Blackwellized es calcular una probabilidad posterior sobre mapas y trayectorias, según lo formulado por Eq.(2)
P(x1:t, m|z1:t, u0:t) = P(x1:t, m|x1:t, z1:t)P(x1:t|z1:t,u0:t) (2)
Donde, u0:t es la secuencial de las mediciones de odometría incluyendo la pose inicial, z1:t es la secuencial de las observaciones, x1:t describe las trayectorias potenciales y m representa el mapa.
Se construye un entorno de simulación para verificar el algoritmo de construcción de mapas, como se muestra en la Fig.3. El robot móvil se mueve por el espacio libre, el entorno está delimitado por las paredes circundantes y las cajas en el interior ilustran diferentes estaciones, que podrían considerarse obstáculos. El área azul que se muestra en la Fig. 3 es el rango de escaneo del robot móvil. Al ordenar al robot móvil que se mueva a través de este entorno de simulación, se construye el mapa de cuadrículas sobre la base de las tecnologías SLAM, como se muestra en Fig.4.
Planificación de rutas en entornos conocidos
Con la disponibilidad del mapa para el entorno, la posición inicial del robot móvil a menudo se establece como un punto de inicio y el objetivo se establece como el punto final en el mapa para construir el camino que se le ordena seguir al robot. Encontrar un camino accesible desde el punto de inicio hasta el punto final y ordenar al robot que se mueva a lo largo del camino considerando la dinámica del robot y los alrededores, se denomina planificador de ruta global y planificador de ruta local.
En el proceso de planificación de rutas globales, el algoritmo de Dijkstra y A* son las dos formas principales de buscar la ruta más corta, que se presentan con la búsqueda de amplitud primero y la búsqueda de profundidad primero, respectivamente. Se describen brevemente como se muestra en la Tabla 2.
Breve descripción del algoritmo de Dijkstra y A*
Tabla 2
| Algoritmo de Dijkstra | Algoritmo A* |
|---|---|
(1) Establece el valor de distancia inicial para cada nodo: asigna 0 al nodo de inicio e infinito a otros (2) Establece el nodo de inicio como actual y marca todos los demás nodos no visitados (3) Para el nodo actual, busca el nodo más cercano cuya distancia al conjunto visitado sea la más corta. (4) Marca el nodo más cercano como visitado para que nunca se vuelva a verificar (5) Si el nodo objetivo ha sido marcado como visitado, entonces la búsqueda ha terminado. De lo contrario, repite el paso de (3) |
(1) Establece el nodo inicial como nodo actual. Calcular el peso para sus vecinos por f(n) = g(n) + h(n), donde g(n) es el costo de la ruta desde el nodo de inicio y h(n) es el costo estimado de n a la meta (2) Establece el nodo cuyo peso es menor que el nodo actual y continúa el paso de (1) (3) Repetir (1) y (2) hasta que el objetivo se identifique como el nodo actual |
No importa qué método se elija, teóricamente se podría generar una ruta accesible. Sin embargo, una ruta accesible no significa una ruta ejecutable. El planificador de rutas local crea un puente entre la ruta accesible y la ruta ejecutable. En esta investigación, se utiliza el algoritmo de ventana dinámica y el algoritmo incluye los siguientes pasos:
- Muestreo discreto en el espacio de control del robot
- Predecir lo que sucedería para cada muestra potencial con estimación anticipada
- Evaluar estas trayectorias candidatas desde el punto de distancia y la coincidencia de la ruta global
- Elegir la trayectoria con mayor puntuación
- Enjuagar y repetir
Para la generación de la ruta ejecutable, el planificador de ruta local muestra una gran ventaja para evitar obstáculos. Cuando el robot móvil sigue la ruta global, las observaciones locales construyen un mapa local para que los obstáculos nuevos/imprevistos se marquen en el mapa local. Luego, el planificador de rutas locales generaría una ruta local para evitar interferencias con estos obstáculos. En este caso, el robot puede evitar obstáculos estáticos y dinámicos con baja velocidad.
Simulación de navegación autónoma
Un entorno de simulación se configura como Fig.3 y el mapa del entorno se ha construido en la sección II.B basado en el algoritmo SLAM. El algoritmo de planificación de rutas se prueba sobre el mapa, con el algoritmo de Dijkstra implementado y verificado en esta parte. En primer lugar, la pose actual del robot se configura en el mapa y la pose actual se establece como el punto de inicio.
Se le ordenaría al robot que siga la ruta que se planifica a través del planificador de ruta global después de que se establezca el objetivo. Como se muestra en la Fig.5, la ruta azul es la ruta global desde el inicio hasta la meta, mientras que el amarillo es la ruta local que sigue la ruta global. Sobre la base de varias rondas de pruebas para la verificación, se concluye que el enfoque de Dijkstra podría generar una ruta global accesible
y la ruta local generada por DWA podría construir la ruta ejecutable para alinearla con la ruta global.
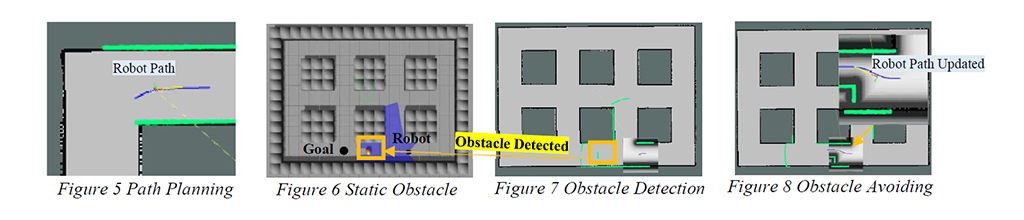
La capacidad de evitar obstáculos también se evalúa aquí. Como se muestra en la Fig.6, un obstáculo imprevisto, que no está marcado en el mapa, se encuentra justo en frente del robot. El obstáculo se encuentra en el rango de escaneo del escáner láser y es detectado por el robot, como se muestra en la Fig.7. Para probar si el robot podría evitar la interferencia del nuevo obstáculo y
pasar por él, se configura un objetivo directamente después del obstáculo detectado para verificar cómo se desempeña el robot en reacción del obstáculo imprevisto para alcanzar el objetivo. Al ejecutar el planificador de rutas locales, se genera un mapa local como se muestra en la Fig.8, con el obstáculo actualizado en el mapa local, la curva amarilla es la ruta local generada para evitar obstáculos. Se pudo ver
que el robot no se mueve directamente hacia delante para causar interferencias con el obstáculo, sino que sigue una ruta adaptada moviéndose alrededor del obstáculo sin colisiones con el obstáculo. Así que aquí se verifica la capacidad del robot para pasar el obstáculo estático, también se ha probado para agregar algunos obstáculos dinámicos que también son capaces de moverse por el mapa a una velocidad relativamente baja, pueden encontrarse con el robot, los resultados de la prueba también muestran que el robot es capaz de actualizar su mapa local con la ruta local generada para evitar colisiones con los obstáculos dinámicos. Los resultados de la simulación verifican el enfoque híbrido con la combinación de planificador de ruta global y planificador de ruta local en la planificación de rutas de robots y la evasión de obstáculos.
ANÁLISIS Y PUNTOS CLAVE
Vehículo de transporte móvil autónomo
Las tecnologías clave desarrolladas y verificadas en la sección II sobre la construcción de mapas y la planificación de rutas con SLAM mejoran la capacidad de navegación autónoma para el robot móvil. Como se compara en la Tabla 1, la tecnología de navegación basada en SLAM no requiere construir el piso con cinta magnética, clavos magnéticos o código QR, tampoco es necesario pegar el objetivo láser en las paredes o estructuras fijas. Es totalmente capaz de construir el mapa de un entorno automáticamente y podría manejarse bien para evitar colisiones con obstáculos imprevistos que no están marcados en el mapa. El robot móvil basado en SLAM es la alternativa óptima para desarrollar un sistema de transporte móvil autónomo.
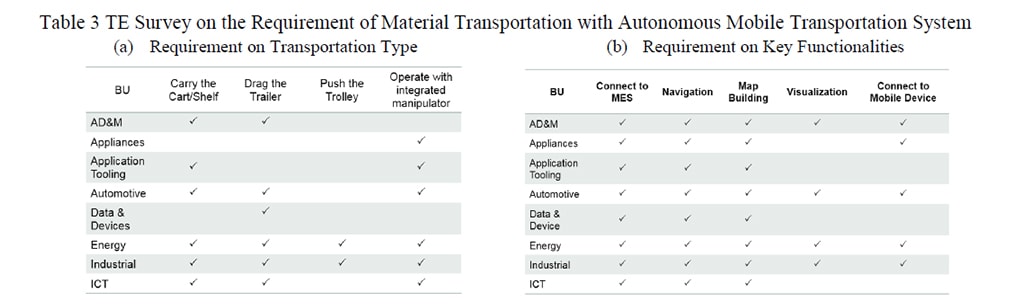
Se ha realizado una encuesta en todas las unidades de negocio de TE para detallar los requisitos del transporte móvil autónomo de materiales. Algunas prioridades altas en el tipo de transporte de materiales son hacer que el robot móvil lleve el carro/estante, arrastre el remolque e integre un manipulador para operar los materiales, como se muestra en la Tabla 3 (a). Las funcionalidades clave con altas prioridades para implementar en el robot móvil autónomo son conectarse a MES, navegar de forma autónoma y construir el mapa automáticamente, como se muestra en la Tabla 3 (b). Entre todas las expectativas, la automatización del proceso de araña de agua con el robot móvil ha sido calificada con alta prioridad por las unidades de negocio. Como se muestra en la Fig. 9, el proceso de araña de agua ha sido el más
crítico para el transporte de materiales desde la bodega/supermercado de materiales hasta las áreas de producción. Aquí se propone desarrollar un vehículo de transporte móvil autónomo (AMT) de tipo latente basado en la tecnología de navegación SLAM para llevar el estante para el transporte flexible de materiales como se muestra en la Fig. 10. El vehículo autónomo es capaz de soportar una carga útil de más de 300 kg y puede funcionar a una velocidad de 0.8 ~ 1 m/s en la planta. Es una alternativa altamente eficiente y efectiva para reemplazar el proceso manual de araña de agua.
Sistema de transporte móvil autónomo
Con la disponibilidad de los Vehículos de Transporte Móvil Autónomo, la clave es integrar los vehículos como parte del sistema de transporte autónomo (AMTS) para desarrollar soluciones de llave en mano para las plantas de TE. La Fig.9 ilustra el proceso general para el transporte de materiales. En general, se necesita un operador para desempacar las cajas de materiales y clasificar los materiales en el
bodega, luego transferir los materiales clasificados a las cajas para ser almacenadas en el supermercado de materiales, se emplean arañas de agua manuales para transportar los materiales desde el supermercado de materiales hasta el área de amortiguación. Las líneas de producción obtienen los materiales del área de amortiguación.
Teniendo en cuenta el hecho de que casi todas las plantas de TE aún no han automatizado ninguna parte del proceso
desde la bodega hasta la línea de producción, aquí primero propone automatizar el proceso de araña de agua con el vehículo de transporte móvil autónomo, como se muestra en la Fig.10. Obviamente, AMT Vehicle proporciona soluciones de automatización de transporte de materiales de extremo a extremo desde el supermercado de materiales hasta la línea de producción, el vehículo AMT sería rápido en respuesta y eficiente en el transporte de materiales, lo que reduce significativamente el costo de mano de obra y ahorra las áreas de amortiguación que se requieren de las arañas de agua manuales.
Ampliar aún más la ventaja de usar AMT Vehicle en su capacidad de conectarse digitalmente a las redes. Aquí también se propone transformar el proceso de solicitud de material de la operación manual con trabajos en papel a un proceso digital. Dado que ahora es común ver operadores/técnicos/ingenieros utilizando los teléfonos inteligentes, aquí se propone desarrollar una app para ser instalada en los terminales móviles para la solicitud de material y comunicación, como se muestra en la Fig.11. En aras de la seguridad en las comunicaciones, las aplicaciones y los Vehículos AMT, así como el servidor, estarán conectados a las redes locales de TE y solo los empleados autorizados podrán iniciar sesión en la aplicación o acceder al sistema para la solicitud de material, las comunicaciones y el monitoreo.

Por lo tanto, se propone la arquitectura del sistema autónomo de transporte móvil como se muestra en la Fig.12. Todos los vehículos AMT son administrados por el sistema de coordinación central AMTS para la asignación de tareas, la planificación de rutas y el control del tráfico.
Las aplicaciones también están conectadas al sistema de coordinación central de AMTS y una vez que las Líneas de producción solicitan materiales a través de la aplicación móvil, el operador en el supermercado de materiales recibiría la solicitud y prepararía los materiales con anticipación, luego el sistema de coordinación central de AMTS asignaría un vehículo AMT para que venga a ejecutar la tarea de transporte
de materiales. Después de que el vehículo AMT entregue con éxito los materiales a las líneas de producción, los operadores pueden hacer clic en confirmar para liberar el recurso de este vehículo AMT que será planificado por el sistema de coordinación central de AMTS.
AGRADECIMIENTOS
Los autores están agradecidos por las sugerencias e instrucciones de Josef Sinder de Automotive BU y Tim Darr de AMT Harrisburg. Los autores también aprecian a Automotive Suzhou Team por introducir el requisito de implementar la automatización del transporte de materiales para automotive Suzhou Plant.
REFERENCIAS
[1] Wang, Lim Chee, Lim Ser Yong y Marcelo H. Ang. "Híbrido de planificación de ruta global y navegación local implementado en un robot móvil en un entorno interior". Control inteligente, 2002. Actas del Simposio Internacional 2002 del IEEE. IEEE, 2002.
[2] Skiena, S. "Algoritmo de Dijkstra". Implementing Discrete Mathematics: Combinatorics and Graph Theory with Mathematica, Reading, MA: Addison-Wesley (1990): 225-227.
[3] Duchoň, František, et al. "Planificación de rutas con algoritmo de estrella A modificado para un robot móvil". Procedia Engineering 96 (2014): 59-69.
[4] Garrido, Santiago, et al. "Planificación de rutas para la navegación de robots móviles utilizando el diagrama de voronoi y la marcha rápida". Robots y sistemas inteligentes, conferencia internacional 2006 del IEEE/RSJ. IEEE, 2006.
[5] Warren, Charles W. "Global path planning using artificial potential fields". Robótica y automatización, 1989. Proceedings, 1989 IEEE International Conference on. IEEE, 1989.
[6] Hoy, Michael, Alexey S. Matveev y Andrey V. Savkin. "Algoritmos para la navegación sin colisiones de robots móviles en entornos complejos y desordenados: una encuesta". Robótica 33.03 (2015): 463-497.
[7] Morari, Manfred, et al. "Model predictive control". Preimpresión (2002).
[8] Fox, Dieter, Wolfram Burgard y Sebastian Thrun. "El enfoque dinámico de la ventana para evitar colisiones". IEEE Robotics & Automation Magazine 4.1 (1997): 23-33.
Desarrollo de un sistema de transporte móvil autónomo
RESUMEN
Los robots móviles autónomos están desempeñando un papel importante en el transporte flexible de materiales. El robot móvil desarrollado basado en la Localización y mapeo simultáneo (SLAM) es totalmente capaz de construir mapas, encontrar caminos y su optimización, así como evitar obstáculos y es más flexible y ágil para automatizar la logística de la fábrica para la transformación digital en almacenamiento automático y transporte de materiales. Hemos investigado en las aplicaciones de las tecnologías de navegación con los robots móviles y hemos desarrollado soluciones desde una perspectiva estratégica para automatizar los procesos de la araña de agua.
PLANTEAMIENTO DEL PROBLEMA
El enfoque convencional de transporte de materiales es utilizar la araña de agua para transportar materiales desde el supermercado o bodega de materiales hasta las áreas de producción. La Fig.1 ilustra un proceso general de araña de agua con el operador para empujar/tirar de un remolque cargado con cajas de materiales en una planta de TE. Normalmente, los materiales no se transportan directamente a las líneas de producción, sino primero a un área de amortiguación, como se muestra en la Fig.2. Las líneas de producción recogen los materiales del área de amortiguamiento y una vez comprobados sin una cantidad suficiente de materiales para apoyar la producción durante las próximas dos o más horas, la línea de producción pondría una etiqueta en el área de amortiguamiento para notificar la solicitud de materiales. Los cuidadores de materiales verifican la disponibilidad de materiales en el área de amortiguamiento una vez que ven/reciben la solicitud de material, los cuidadores de materiales ayudarían a solicitar materiales del supermercado o bodega de materiales, con una araña de agua asignada para transportar los materiales. Obviamente, el enfoque convencional requiere mucha mano de obra y tiene poca eficiencia. Además, generalmente hay muchos tipos diferentes de materiales para administrar y se necesita un poco de esfuerzo para encontrar/localizar materiales, lo que afecta aún más la eficiencia del transporte de materiales. Lo que es peor, la araña de agua manual podría no responder a la solicitud de transporte de materiales a tiempo, lo que podría hacer que las líneas de producción esperen a que lleguen los materiales y con ello afecten la productividad de las líneas de producción.
La automatización y la transformación digital ayudarían en gran medida a mejorar la eficiencia del transporte de materiales y reducir el tiempo de respuesta. Los robots móviles autónomos que pueden moverse de forma autónoma y mejorarse con conexiones digitales a las líneas de producción y los sistemas MES, son excelentes alternativas para reemplazar a las arañas de agua manuales. En general, hay cuatro tipos diferentes principales de tecnologías de navegación: navegación de ruta fija, navegación de destino láser, navegación inercial y navegación SLAM, como se muestra en la Tabla 1. El método de navegación de ruta fija, que requiere construir cintas magnéticas para pegar en el piso para guiar al robot móvil a seguir, tiene la movilidad y flexibilidad más bajas; la navegación láser de objetivos, que se basa en Laser Target para reflejar el rayo láser posterior al robot para una localización precisa del robot, es baja en compatibilidad en el entorno y una vez que la posición de Laser Target se cambia o bloquea por otros obstáculos, sería muy difícil navegar por el robot móvil con precisión; la navegación inercial, que requiere construir el piso instalando clavos magnéticos o pegando códigos QR, tiene una mejor compatibilidad con el cambio de diseño del entorno, pero solo es accesible a las áreas que se construyen con clavos magnéticos o códigos QR; la navegación SLAM, que es totalmente capaz de actualizar el mapa en tiempo real para la búsqueda de caminos, la evitación de obstáculos y la navegación autónoma, tiene la mayor compatibilidad con el entorno y la flexibilidad para moverse de forma autónoma y es una tecnología de navegación óptima para el transporte flexible de materiales en las áreas de producción que tiene interacciones frecuentes con humanos u otros dispositivos móviles. La Tabla 1 hace una comparación entre diferentes tecnologías de navegación. Nuestra dirección es desarrollar sistemas de transporte móvil autónomo basados en la navegación SLAM para TE.
MÉTODOS Y RESULTADOS
Tecnología de navegación de última generación en robots móviles
La navegación, que se basa en la localización y la percepción del entorno, es un tema de investigación de alto nivel en robótica. En general, un planificador de ruta global es bueno para producir una ruta optimizada, pero pobre para reaccionar ante obstáculos desconocidos. Incontrast, un método de navegación local/reactivo funciona bien en entornos dinámicos e inicialmente desconocidos, pero es ineficiente, especialmente en entornos complejos[1]. Esta investigación estudia los algoritmos de planificación de rutas globales y locales y propone el método de navegación híbrida.
La planificación global de caminos ha sido bien estudiada en el área académica y aplicada en muchos casos prácticos. El algoritmo basado en grafos es una rama comúnmente utilizada entre ellos, como el gráfico Dijkstra[2], A*[3] y Voronoi[4] que generalmente se usan en un área acotada. Los métodos de Campo Potencial Artificial (APF)[5] utilizan más información del entorno y son adecuados en la navegación en tiempo real.
Sin embargo, las trayectorias generadas por APF generalmente no son óptimas. El proceso de decisión de Markov es un método probabilístico en el que la decisión solo se refiere al último estado y no tiene nada que ver con otros estados anteriores. Además, se discuten algunos otros algoritmos de planificación de rutas globales [6] para descubrir el camino para alcanzar la meta.
La planificación de caminos locales se ocupa de evitar obstáculos en un entorno local. El control predictivo de modelos (MPC) [7] se aplica cada vez más en la navegación de los robots móviles autónomos debido a su resistencia y convergencia en la planificación de rutas. La idea clave de MPC es predecir el futuro con un modelo personalizado para hacer la planificación de rutas y luego aplicar el control inicial correspondiente a la trayectoria elegida para el robot móvil. El enfoque dinámico de ventanas (DWA)[8], que evalúa cada trayectoria y selecciona la que tiene la puntuación más alta, no solo es un algoritmo independiente, sino también un componente de MPC. Sin embargo, DWA supone que todos los obstáculos son estáticos, lo que no es aplicable para evitar obstáculos dinámicos con una velocidad relativamente alta. Los algoritmos como el obstáculo de velocidad y los conos de colisión dan por hecho que los obstáculos se mueven con velocidad y aceleración deterministas.
Obviamente, en la mayoría de las plantas de TE, hay diseños relativamente estáticos en los equipos y líneas de producción con entornos conocidos y también movimientos impredecibles de operadores de dispositivos, que se consideran los obstáculos dinámicos, ni la planificación de rutas globales ni los enfoques de planificación de rutas locales funcionarían bien para las navegaciones de los robots móviles. Es necesario desarrollar un método híbrido con planificador de ruta local combinado y planificador de ruta global para realizar la navegación.
Bases de la navegación autónoma: Construcción de mapas
Cuando el robot móvil autónomo se despliega en un entorno desconocido para encontrar de forma autónoma la manera de alcanzar la meta, el robot tiene que atravesar todo el entorno hasta lograr el objetivo. Si bien se agregan y establecen algunos objetivos nuevos, no es prudente ordenar al robot que atraviese cada vez, lo que es un alto costo del tiempo de cómputo y el espacio de almacenamiento.
Además, el objetivo suele ser una posición relativa con respecto al robot móvil mientras navega por todo el entorno. Por lo tanto, es importante emplear un descriptor ambiental, por ejemplo el mapa, para registrar y describir la información del entorno para que el robot sepa dónde está y a dónde ir exactamente. Hay diferentes variaciones
Para el mapa, como el mapa de entidades, el mapa de topología, el mapa de agarre y el método basado en apariencia. Feature Map, que describe el entorno con puntos clave, líneas o planos, contribuye a una visualización animada.
El mapa de topología describe los nodos y la conectividad del entorno. El método basado en la apariencia calcula directamente la pose de los robots. Grid Map tiene en cuenta tanto la simplicidad como la visualización en la representación del entorno. Por lo tanto, Grid Map es una opción óptima como descriptor ambiental para la navegación de los robots móviles. En esta sección se estudia el enfoque para mapear la construcción de un entorno desconocido para obtener un mapa de agarre.
Sin un conocimiento previo del entorno, la localización y mapeo simultáneo (SLAM), que construye el mapa del entorno desconocido mientras rastrea la pose del robot simultáneamente, juega un papel vital en la construcción de mapas. En nuestro método, se utiliza el filtro de partículas Rao-Blackwellized para SLAM con el fin de garantizar la resistencia y la calidad del mapeo. Uno de los algoritmos de filtrado de partículas más comunes es el filtro de muestreo por importancia de muestreo (SIR). El proceso de mapeo con el filtro SIR Rao-Blackwellized se descompone en los siguientes pasos:
- Muestreo: la pose actual del robot xt(i) se calcula con la última pose del robot xt-1(i) por la distribución de la propuesta π(xt|z1:t,u0:t)
- Ponderación de importancia: cada partícula se formula sobre su propia ponderación, según lo descrito por Eq.(1)
- Remuestreo: para evitar las partículas infinitas y asegurar la convergencia del algoritmo, se debe reducir la cantidad de partículas y las partículas de ponderaciones de baja importancia se sustituyen por las de alta para el proceso de remuestreo.
- Estimación de mapas: El mapa actual mt(i) se estima con las observaciones históricas z1:t y plantea x1:t.
Por lo tanto, la idea principal del filtro de partículas Rao-Blackwellized es calcular una probabilidad posterior sobre mapas y trayectorias, según lo formulado por Eq.(2)
P(x1:t, m|z1:t, u0:t) = P(x1:t, m|x1:t, z1:t)P(x1:t|z1:t,u0:t) (2)
Donde, u0:t es la secuencial de las mediciones de odometría incluyendo la pose inicial, z1:t es la secuencial de las observaciones, x1:t describe las trayectorias potenciales y m representa el mapa.
Se construye un entorno de simulación para verificar el algoritmo de construcción de mapas, como se muestra en la Fig.3. El robot móvil se mueve por el espacio libre, el entorno está delimitado por las paredes circundantes y las cajas en el interior ilustran diferentes estaciones, que podrían considerarse obstáculos. El área azul que se muestra en la Fig. 3 es el rango de escaneo del robot móvil. Al ordenar al robot móvil que se mueva a través de este entorno de simulación, se construye el mapa de cuadrículas sobre la base de las tecnologías SLAM, como se muestra en Fig.4.
Planificación de rutas en entornos conocidos
Con la disponibilidad del mapa para el entorno, la posición inicial del robot móvil a menudo se establece como un punto de inicio y el objetivo se establece como el punto final en el mapa para construir el camino que se le ordena seguir al robot. Encontrar un camino accesible desde el punto de inicio hasta el punto final y ordenar al robot que se mueva a lo largo del camino considerando la dinámica del robot y los alrededores, se denomina planificador de ruta global y planificador de ruta local.
En el proceso de planificación de rutas globales, el algoritmo de Dijkstra y A* son las dos formas principales de buscar la ruta más corta, que se presentan con la búsqueda de amplitud primero y la búsqueda de profundidad primero, respectivamente. Se describen brevemente como se muestra en la Tabla 2.
Breve descripción del algoritmo de Dijkstra y A*
Tabla 2
| Algoritmo de Dijkstra | Algoritmo A* |
|---|---|
(1) Establece el valor de distancia inicial para cada nodo: asigna 0 al nodo de inicio e infinito a otros (2) Establece el nodo de inicio como actual y marca todos los demás nodos no visitados (3) Para el nodo actual, busca el nodo más cercano cuya distancia al conjunto visitado sea la más corta. (4) Marca el nodo más cercano como visitado para que nunca se vuelva a verificar (5) Si el nodo objetivo ha sido marcado como visitado, entonces la búsqueda ha terminado. De lo contrario, repite el paso de (3) |
(1) Establece el nodo inicial como nodo actual. Calcular el peso para sus vecinos por f(n) = g(n) + h(n), donde g(n) es el costo de la ruta desde el nodo de inicio y h(n) es el costo estimado de n a la meta (2) Establece el nodo cuyo peso es menor que el nodo actual y continúa el paso de (1) (3) Repetir (1) y (2) hasta que el objetivo se identifique como el nodo actual |
No importa qué método se elija, teóricamente se podría generar una ruta accesible. Sin embargo, una ruta accesible no significa una ruta ejecutable. El planificador de rutas local crea un puente entre la ruta accesible y la ruta ejecutable. En esta investigación, se utiliza el algoritmo de ventana dinámica y el algoritmo incluye los siguientes pasos:
- Muestreo discreto en el espacio de control del robot
- Predecir lo que sucedería para cada muestra potencial con estimación anticipada
- Evaluar estas trayectorias candidatas desde el punto de distancia y la coincidencia de la ruta global
- Elegir la trayectoria con mayor puntuación
- Enjuagar y repetir
Para la generación de la ruta ejecutable, el planificador de ruta local muestra una gran ventaja para evitar obstáculos. Cuando el robot móvil sigue la ruta global, las observaciones locales construyen un mapa local para que los obstáculos nuevos/imprevistos se marquen en el mapa local. Luego, el planificador de rutas locales generaría una ruta local para evitar interferencias con estos obstáculos. En este caso, el robot puede evitar obstáculos estáticos y dinámicos con baja velocidad.
Simulación de navegación autónoma
Un entorno de simulación se configura como Fig.3 y el mapa del entorno se ha construido en la sección II.B basado en el algoritmo SLAM. El algoritmo de planificación de rutas se prueba sobre el mapa, con el algoritmo de Dijkstra implementado y verificado en esta parte. En primer lugar, la pose actual del robot se configura en el mapa y la pose actual se establece como el punto de inicio.
Se le ordenaría al robot que siga la ruta que se planifica a través del planificador de ruta global después de que se establezca el objetivo. Como se muestra en la Fig.5, la ruta azul es la ruta global desde el inicio hasta la meta, mientras que el amarillo es la ruta local que sigue la ruta global. Sobre la base de varias rondas de pruebas para la verificación, se concluye que el enfoque de Dijkstra podría generar una ruta global accesible
y la ruta local generada por DWA podría construir la ruta ejecutable para alinearla con la ruta global.
La capacidad de evitar obstáculos también se evalúa aquí. Como se muestra en la Fig.6, un obstáculo imprevisto, que no está marcado en el mapa, se encuentra justo en frente del robot. El obstáculo se encuentra en el rango de escaneo del escáner láser y es detectado por el robot, como se muestra en la Fig.7. Para probar si el robot podría evitar la interferencia del nuevo obstáculo y
pasar por él, se configura un objetivo directamente después del obstáculo detectado para verificar cómo se desempeña el robot en reacción del obstáculo imprevisto para alcanzar el objetivo. Al ejecutar el planificador de rutas locales, se genera un mapa local como se muestra en la Fig.8, con el obstáculo actualizado en el mapa local, la curva amarilla es la ruta local generada para evitar obstáculos. Se pudo ver
que el robot no se mueve directamente hacia delante para causar interferencias con el obstáculo, sino que sigue una ruta adaptada moviéndose alrededor del obstáculo sin colisiones con el obstáculo. Así que aquí se verifica la capacidad del robot para pasar el obstáculo estático, también se ha probado para agregar algunos obstáculos dinámicos que también son capaces de moverse por el mapa a una velocidad relativamente baja, pueden encontrarse con el robot, los resultados de la prueba también muestran que el robot es capaz de actualizar su mapa local con la ruta local generada para evitar colisiones con los obstáculos dinámicos. Los resultados de la simulación verifican el enfoque híbrido con la combinación de planificador de ruta global y planificador de ruta local en la planificación de rutas de robots y la evasión de obstáculos.
ANÁLISIS Y PUNTOS CLAVE
Vehículo de transporte móvil autónomo
Las tecnologías clave desarrolladas y verificadas en la sección II sobre la construcción de mapas y la planificación de rutas con SLAM mejoran la capacidad de navegación autónoma para el robot móvil. Como se compara en la Tabla 1, la tecnología de navegación basada en SLAM no requiere construir el piso con cinta magnética, clavos magnéticos o código QR, tampoco es necesario pegar el objetivo láser en las paredes o estructuras fijas. Es totalmente capaz de construir el mapa de un entorno automáticamente y podría manejarse bien para evitar colisiones con obstáculos imprevistos que no están marcados en el mapa. El robot móvil basado en SLAM es la alternativa óptima para desarrollar un sistema de transporte móvil autónomo.
Se ha realizado una encuesta en todas las unidades de negocio de TE para detallar los requisitos del transporte móvil autónomo de materiales. Algunas prioridades altas en el tipo de transporte de materiales son hacer que el robot móvil lleve el carro/estante, arrastre el remolque e integre un manipulador para operar los materiales, como se muestra en la Tabla 3 (a). Las funcionalidades clave con altas prioridades para implementar en el robot móvil autónomo son conectarse a MES, navegar de forma autónoma y construir el mapa automáticamente, como se muestra en la Tabla 3 (b). Entre todas las expectativas, la automatización del proceso de araña de agua con el robot móvil ha sido calificada con alta prioridad por las unidades de negocio. Como se muestra en la Fig. 9, el proceso de araña de agua ha sido el más
crítico para el transporte de materiales desde la bodega/supermercado de materiales hasta las áreas de producción. Aquí se propone desarrollar un vehículo de transporte móvil autónomo (AMT) de tipo latente basado en la tecnología de navegación SLAM para llevar el estante para el transporte flexible de materiales como se muestra en la Fig. 10. El vehículo autónomo es capaz de soportar una carga útil de más de 300 kg y puede funcionar a una velocidad de 0.8 ~ 1 m/s en la planta. Es una alternativa altamente eficiente y efectiva para reemplazar el proceso manual de araña de agua.
Sistema de transporte móvil autónomo
Con la disponibilidad de los Vehículos de Transporte Móvil Autónomo, la clave es integrar los vehículos como parte del sistema de transporte autónomo (AMTS) para desarrollar soluciones de llave en mano para las plantas de TE. La Fig.9 ilustra el proceso general para el transporte de materiales. En general, se necesita un operador para desempacar las cajas de materiales y clasificar los materiales en el
bodega, luego transferir los materiales clasificados a las cajas para ser almacenadas en el supermercado de materiales, se emplean arañas de agua manuales para transportar los materiales desde el supermercado de materiales hasta el área de amortiguación. Las líneas de producción obtienen los materiales del área de amortiguación.
Teniendo en cuenta el hecho de que casi todas las plantas de TE aún no han automatizado ninguna parte del proceso
desde la bodega hasta la línea de producción, aquí primero propone automatizar el proceso de araña de agua con el vehículo de transporte móvil autónomo, como se muestra en la Fig.10. Obviamente, AMT Vehicle proporciona soluciones de automatización de transporte de materiales de extremo a extremo desde el supermercado de materiales hasta la línea de producción, el vehículo AMT sería rápido en respuesta y eficiente en el transporte de materiales, lo que reduce significativamente el costo de mano de obra y ahorra las áreas de amortiguación que se requieren de las arañas de agua manuales.
Ampliar aún más la ventaja de usar AMT Vehicle en su capacidad de conectarse digitalmente a las redes. Aquí también se propone transformar el proceso de solicitud de material de la operación manual con trabajos en papel a un proceso digital. Dado que ahora es común ver operadores/técnicos/ingenieros utilizando los teléfonos inteligentes, aquí se propone desarrollar una app para ser instalada en los terminales móviles para la solicitud de material y comunicación, como se muestra en la Fig.11. En aras de la seguridad en las comunicaciones, las aplicaciones y los Vehículos AMT, así como el servidor, estarán conectados a las redes locales de TE y solo los empleados autorizados podrán iniciar sesión en la aplicación o acceder al sistema para la solicitud de material, las comunicaciones y el monitoreo.
Por lo tanto, se propone la arquitectura del sistema autónomo de transporte móvil como se muestra en la Fig.12. Todos los vehículos AMT son administrados por el sistema de coordinación central AMTS para la asignación de tareas, la planificación de rutas y el control del tráfico.
Las aplicaciones también están conectadas al sistema de coordinación central de AMTS y una vez que las Líneas de producción solicitan materiales a través de la aplicación móvil, el operador en el supermercado de materiales recibiría la solicitud y prepararía los materiales con anticipación, luego el sistema de coordinación central de AMTS asignaría un vehículo AMT para que venga a ejecutar la tarea de transporte
de materiales. Después de que el vehículo AMT entregue con éxito los materiales a las líneas de producción, los operadores pueden hacer clic en confirmar para liberar el recurso de este vehículo AMT que será planificado por el sistema de coordinación central de AMTS.
AGRADECIMIENTOS
Los autores están agradecidos por las sugerencias e instrucciones de Josef Sinder de Automotive BU y Tim Darr de AMT Harrisburg. Los autores también aprecian a Automotive Suzhou Team por introducir el requisito de implementar la automatización del transporte de materiales para automotive Suzhou Plant.
REFERENCIAS
[1] Wang, Lim Chee, Lim Ser Yong y Marcelo H. Ang. "Híbrido de planificación de ruta global y navegación local implementado en un robot móvil en un entorno interior". Control inteligente, 2002. Actas del Simposio Internacional 2002 del IEEE. IEEE, 2002.
[2] Skiena, S. "Algoritmo de Dijkstra". Implementing Discrete Mathematics: Combinatorics and Graph Theory with Mathematica, Reading, MA: Addison-Wesley (1990): 225-227.
[3] Duchoň, František, et al. "Planificación de rutas con algoritmo de estrella A modificado para un robot móvil". Procedia Engineering 96 (2014): 59-69.
[4] Garrido, Santiago, et al. "Planificación de rutas para la navegación de robots móviles utilizando el diagrama de voronoi y la marcha rápida". Robots y sistemas inteligentes, conferencia internacional 2006 del IEEE/RSJ. IEEE, 2006.
[5] Warren, Charles W. "Global path planning using artificial potential fields". Robótica y automatización, 1989. Proceedings, 1989 IEEE International Conference on. IEEE, 1989.
[6] Hoy, Michael, Alexey S. Matveev y Andrey V. Savkin. "Algoritmos para la navegación sin colisiones de robots móviles en entornos complejos y desordenados: una encuesta". Robótica 33.03 (2015): 463-497.
[7] Morari, Manfred, et al. "Model predictive control". Preimpresión (2002).
[8] Fox, Dieter, Wolfram Burgard y Sebastian Thrun. "El enfoque dinámico de la ventana para evitar colisiones". IEEE Robotics & Automation Magazine 4.1 (1997): 23-33.