Informe técnico
Dar sentido a los sensores
Guía del diseñador de LiDAR sobre tecnologías de sensores para sistemas automotrices/de movilidad

Los sistemas LiDAR de hoy están recibiendo nuevos usos, desde la seguridad al mapeo y hasta la automatización industrial. Un sector con niveles particularmente altos de interés y desarrollo: el mercado de la movilidad. Los escáneres LiDAR son componentes críticos en los sistemas prototipo para vehículos autónomos, así como en los sistemas actuales para el control de crucero adaptativo (adaptive cruise control, ACC), los sistemas para evitar colisiones, el reconocimiento de señales de tráfico, la detección de puntos ciegos y la advertencia de abandono de carril. Ninguno de estos sistemas basados en LiDAR puede funcionar sin un componente clave: sus sensores, los "ojos" del sistema. Este documento se centrará en cómo los ingenieros de diseño para fabricantes de equipos originales (original equipment manufacturers, OEM) de sistemas LiDAR pueden elegir entre diferentes tecnologías de sensores.
Antecedentes
Los sistemas de detección y alcance de la luz (light detection and ranging, LiDAR) de movilidad deben detectar el entorno de forma rápida y confiable, de modo que reúnan una imagen del entorno inmediato y el camino por delante tan detallada como sea económicamente posible. Muy por delante: los sistemas montados en automóviles de conducción rápida necesitan "ver" un mínimo de 150 metros (casi 500 pies) hacia delante y detectar objetos pequeños de hasta 10 centímetros (unas 4 pulgadas) de altura.
Todo esto presenta requisitos técnicos desafiantes para los sensores de los sistemas.
La misión exige sistemas de sensores complementarios pero independientes, con seguridad funcional garantizada y cualificación ambiental. Por ejemplo, las unidades deben estar clasificadas para temperaturas de funcionamiento de -40 a 125 °C (-40 a 257 °F) para tomar en cuenta tanto la calefacción ambiental como el calor de otros componentes del sistema. Los sensores deben contar con una óptima relación señal a ruido para "ver" la señal a través de cualquier fondo que cause distracciones. Además, dado que los detectores ópticos deben estar preparados para ocuparse de diversos niveles de luz ambiental, los sensores deben tener un amplio rango dinámico.
(Tenga en cuenta que el término "detector" puede referirse solo al elemento de detección fotoeléctrico, mientras que "sensor" incluye al detector más los elementos electrónicos adyacentes que proporcionan funciones como la conectividad. En ocasiones, los términos se usan de manera indistinta).
LIDAR en acción
Además de la física básica, los diseñadores de sistemas LiDAR también deben tomar en consideración la economía básica. Todos los componentes del automóvil deben ser lo más rentables que sea posible. Para cualquier fin práctico, la mejor relación costo/rendimiento sobrepasa a la mejor tecnología. Todos los sistemas de movilidad automotriz actuales que utilizan LiDAR de largo alcance son dispositivos de "escaneo", que mueven el rayo láser paso a paso sobre toda la escena. Alcance efectivo utilizando la tecnología actual: de 30 a 300 m (aproximadamente de 100 a 1000 pies). Casi todos se basan en láseres de 905 nanómetros (nm). Estos emiten haces invisibles, están disponibles a bajo costo en altos volúmenes y utilizan alta potencia para pulsos cortos (por ejemplo, 75 W pico durante 5 nanosegundos), por lo que presentan una óptima relación potencia a costo. Estos láseres se han utilizado ampliamente con tecnología de detector de silicio madura y económica.
Selección de la mejor tecnología de sensores
A medida que la industria avanza, los ingenieros de diseño están aplicando varias tecnologías de sensores diferentes para los sistemas de movilidad LiDAR. Cada una tiene ventajas e inconvenientes, como se describe a continuación.
Detectores de diodos PIN de silicio
Estos detectores basados en silicio tienen una estructura con tres tipos de semiconductores en capas: tipo P / intrínseco / tipo N.
Muestran buen rango dinámico, con la capacidad de manejar cantidades de luz ampliamente variables. Por ejemplo, pueden detectar el reflejo de un objeto distante, incluso cuando se someten a la luz solar directa. Y son relativamente baratos.
Sin embargo, no pueden ofrecer los altos niveles de ancho de banda o rendimiento de señal a ruido que requiere la mayoría de los sistemas LiDAR de movilidad modernos. Por último, no son ni muy sensibles ni muy rápidos.
Detectores de fotomultiplicador de silicio (silicon photomultiplier, SiPM) y diodo de avalancha de fotón único (single-photon avalanche diode, SPAD)
Sus fabricantes desarrollaron originalmente estos sensores de estado sólido basados en silicio para aplicaciones científicas y médicas pequeñas y especializadas. Más recientemente, han intentado probarlos en el mercado LiDAR más grande.
Estos sensores funcionan de manera similar a los APD (ver más abajo), pero están optimizados para una amplificación o ganancia interna muy alta, lo que les permite detectar las menores cantidades de luz. También son muy rápidos. En último lugar, son compatibles con la tecnología CMOS comúnmente disponible y, por lo tanto, se pueden emparejar con los elementos electrónicos asociados en el mismo chip.
Sin embargo, la sensibilidad de sus contadores de fotón único es mucho menor que la de los APD. Por lo tanto, deben confiar en una multiplicación muy alta. Por desgracia, el proceso de multiplicación agrega ruido que a menudo degrada de modo significativo la relación señal a ruido. Su mecanismo de amplificación también es propenso a falsos accionadores derivados de altas temperaturas. Quizás el inconveniente más grave de estos sensores sea que su alta ganancia se produce a costa de problemas de saturación.
Para empezar, los sensores deben lidiar con la luz láser que reflejan los objetos que se encuentran delante. Además, muchos sistemas LiDAR especifican escáneres con amplios campos de visión. Esto coloca una gran cantidad de luz adicional en un sensor SIPM o SPAD. Además, algunos fenómenos que se encuentran de forma habitual en entornos de movilidad LiDAR, como la luz solar brillante, las luces altas u otros sistemas LiDAR, pueden saturar el sensor con niveles de luz más altos de los que puede manejar, incluso cuando se usan filtros ópticos. A medida que continúa el trabajo de desarrollo para compensar los inconvenientes, estos sensores a menudo se tienen consideración para diversas aplicaciones LiDAR. Pero hasta la fecha, los temas de saturación y demás problemas mencionados anteriormente les impiden convertirse en los detectores de elección para escanear LiDAR de largo alcance.
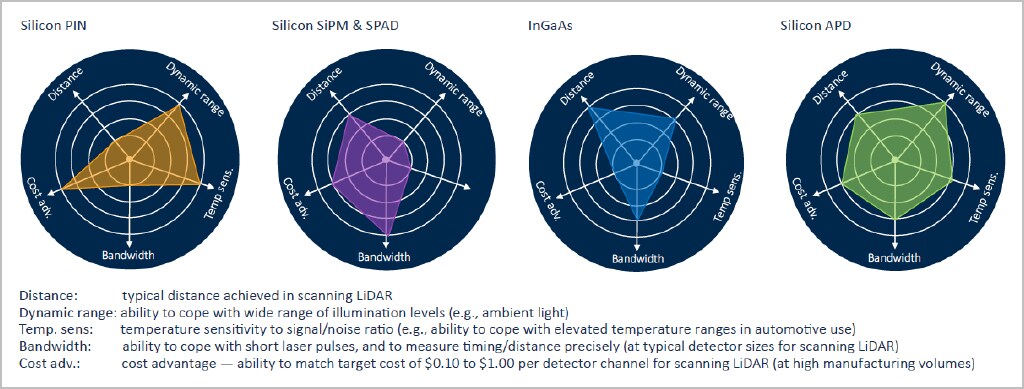
Figura 2 Comparación de las tecnologías de detección
Detectores de fotodiodo de arseniuro de indio y galio (InGaAs)
Estos sensores se utilizan con frecuencia en tamaños pequeños en fibras de vidrio de telecomunicaciones, pero son recién llegados a LiDAR, excepto por las aplicaciones militares o aeroespaciales especializadas. Esta tecnología abandona la construcción convencional basada en silicio por el material de arseniuro de indio y galio (Indium gallium arsenide, InGaAs).
Con sistemas láser especialmente construidos para su espectro más alto (1550 nm, frente a 905 nm para los otros sensores que se abordan aquí), este diseño debería ser más sensible y capaz de emitir más potencia. Por lo tanto, puede habilitar un sistema LiDAR automotriz con un alcance más largo que la mayoría de los otros sensores.
Sin embargo, el rendimiento del detector InGaAs se puede degradar de manera significativa incluso con temperaturas ambiente ligeramente más altas de lo normal. El sensor bien puede necesitar un sistema de refrigeración externo, incluso en climas templados.
Además, su material base es significativamente más caro que los sustratos de silicio ampliamente utilizados. Además, la fabricación de sensores InGaAs en tamaños grandes para uso LiDAR requeriría una fabricación mucho más compleja que los diseños de silicio. Hasta la fecha, no se han fabricado con éxito en grandes volúmenes comerciales.
Por último, dado que esta tecnología es nueva en el mundo LiDAR automotriz, los OEM tendrían que estar preparados para dedicar tiempo, esfuerzo e ingresos sustanciales tratando de desarrollar un nuevo sistema LiDAR en torno a cualquier detector InGaAs.
Detectores de fotodiodo de avalancha (APD)
Perfeccionados en un principio para aplicaciones industriales y militares, estos fotodetectores basados en silicio funcionan al permitir que los fotones entrantes accionen una avalancha de carga, lo que multiplica la ganancia por su mecanismo de amplificación interno. Su estructura optimizada con absorción convierte al menos el 80 % de la luz reflejada de 905 nm de un láser en corriente fotoeléctrica. Resultado: mucho mayor sensibilidad.
Además de su notable sensibilidad, los APD tienen una relación señal a ruido óptima, saturación mínima y muy buena velocidad. También se encuentran entre las tecnologías de sensores de menor costo disponibles.
Un inconveniente potencial: los APD utilizan tecnología bipolar especializada que no es compatible con la fabricación CMOS común. Por lo tanto, solo se pueden obtener con un pequeño número de proveedores. Además, no se pueden emparejar en el mismo chip con sus elementos electrónicos CMOS asociados.
Sin embargo, los proveedores experimentados pueden fabricar paquetes con sensores y componentes electrónicos en chips adyacentes cercanos. Ambos se pueden optimizar para obtener el mejor rendimiento de su clase, sin concesiones. Por ejemplo, una serie de sensores APD se puede complementar con amplificadores de transimpedancia (transimpedance amplifier, TIA) especialmente diseñados, con ganancias y anchos debanda personalizados, para convertir la fotocorriente en voltaje y condicionar la señal que ingresa al sistema para una alta ganancia. Esto puede maximizar el rendimiento, en particular en condiciones de poca luz.
Los APD se producen mediante procesos de fabricación comercial bien establecidos y de alta productividad y se prueban en una amplia variedad de sistemas que ya están en la carretera.
En esencia, cuando se hacen bien, combinan rendimiento comprobado con un precio atractivo. En la actualidad, los detectores de elección para LiDAR de largo alcance automotriz, los APD, son componentes críticos en varios de los sistemas de movilidad más avanzados de hoy en día.
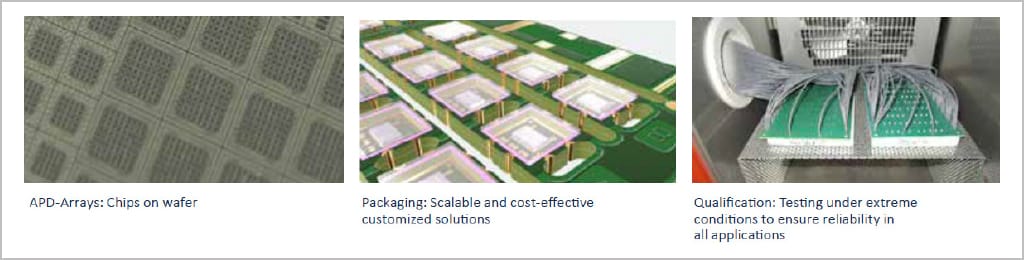
Figura 3 Detectores de fotodiodo de avalancha (APD)
Selección del mejor proveedor de sensores
Una vez que se determina la tecnología de sensores correcta, los diseñadores de sistemas LiDAR aún enfrentan el desafío de elegir al proveedor de sensores correcto.
Los candidatos se debe evaluar con cautela. ¿Tienen la tecnología, la capacidad y los conocimientos para adaptar sus sensores y sistemas a los requisitos y mercados individuales de un OEM? ¿Trabajarán en estrecha colaboración con el equipo OEM en el diseño, la fabricación y la programación para garantizar un tiempo de comercialización decisivo?
Empeño en la experiencia
Si un proveedor de sensores debe dedicar tiempo a acelerar su desarrollo, fabricación, calificación automotriz y otros procesos, el OEM de movilidad LiDAR perderá la carrera por el tiempo de comercialización más rápido.
Los proveedores de sensores adquieren la experiencia al hacer el trabajo. Un buen candidato ya habrá aplicado su tecnología de sensores/detectores para aplicaciones de movilidad. Esto podría incluir diseño APD estándar y personalizado; fabricación e ingeniería de matrices, paquetes y módulos estándares y personalizados; y la mejor electrónica de su clase.
Un proveedor ideal tendrá un historial comprobado, con productos como APD de grado automotriz y elementos electrónicos relacionados que ya utilizan los principales OEM LiDAR.
Evaluación de la fabricación integrada
Los diseñadores deben priorizar a un proveedor con ventajas técnicas relevantes, como el menor ruido y la mayor sensibilidad. Pero también deben buscar un fabricante de sensores que mantenga el control integral de su dominio.
Todo el proceso de producción se debe implementar como una totalidad coherente, desde el procesamiento de los chips hasta la prefabricación de los sistemas de sensores. Al fabricar todos los componentes centrales internamente, un proveedor garantiza la larga disponibilidad de todos los productos OEM para la producción en serie y los mercados de accesorios.
Verificación de las capacidades de personalización
Para tener éxito como fabricante de sistemas LiDAR, es importante lograr la mejor relación costo a rendimiento; eso puede ayudar a diferenciar un sistema dado del resto del mercado superpoblado. Los sensores listos para usar bien podrían no encajar a la perfección. En cambio, los componentes a menudo se deben personalizar para adaptarse con precisión a un diseño de sistema elegido.
Los fabricantes de sistemas necesitan encontrar un proveedor de sensores que sea ágil y receptivo. En muchos casos, un proveedor debe trabajar con los diseñadores OEM para personalizar el sensor y los componentes electrónicos relacionados y lograr la integración más estrecha posible con el resto del sistema y, por lo tanto, alcanzar un rendimiento óptimo.
Ejemplos: el equipo necesita establecer geometrías de sensores que se ajusten a una elección dada de lentes; optimizar las dimensiones; y adaptarse por otra parte a las configuraciones de cada diseño óptico único. El equipo debe determinar el recuento óptimo de canales (cuántas señales se reciben en paralelo) para maximizar la resolución espacial del escáner. Asimismo, debe personalizar el embalaje para tener las interfaces más cortas posibles entre el sensor y los elementos electrónicos.
En último lugar, un proveedor superior debe proporcionar sensores que posean ventajas técnicas refinadas, como la homogeneidad multipíxel. Si los fotodiodos no son homogéneos o son de origen diverso, reaccionarán de manera diferente a la temperatura ambiente bajo el uso en el mundo real. Esto puede degradar significativamente el rendimiento del escáner LiDAR. En cambio, la homogeneidad multipíxel puede proporcionar la distribución de información de señal más ajustada posible, incluso a distancias máximas.
Selección del mejor proveedor de sensores
Un proveedor de sensores excepcional ya debería conocer las "reglas del camino". Debe tener experiencia en la cualificación automotriz más reciente, validación de robustez y estándares y regulaciones de caracterización.
Algunos ejemplos incluyen la producción y las pruebas certificadas de la industria automotriz ISO/TS 16949, así como el paquete de matriz APD calificado para automóviles AEC-Q 102 y 104. El proveedor debe ser capaz de aplicar estas y otras normas relevantes a todos sus componentes e instalaciones de fabricación para cumplir con las regulaciones y ayudar a los OEM de sistemas a evitar responsabilidades.
El aumento de las regulaciones es inevitable. Los proveedores deben demostrar el cumplimiento a través de las mejores prácticas documentadas, como la rigurosa autocalificación que inició Ford Motor Company en su Programa Q.
Búsqueda de soporte preparado para el futuro
Un proveedor también debe demostrar un historial comprobado de calidad y cumplimiento en las entregas, así como altos niveles de soporte, desde el desarrollo inicial hasta el servicio de mantenimiento.
El diseño del sensor se debe tomar en cuenta desde el inicio del diseño del sistema. Cuanto antes un OEM involucre al proveedor del sensor, más rápido y fácil será todo el proceso de diseño / fabricación, y mejor funcionará el sistema LiDAR resultante.
Por último, un proveedor siempre debe estar mirando hacia delante a los desarrollos futuros en este campo en rápida evolución. El fabricante de sensores adecuado tendrá una hoja de ruta de innovación de los desarrollos normativos, comerciales y tecnológicos esperados a fin de ayudar a los fabricantes de sistemas a navegar por este mercado en cambio constante.
CONCLUSIÓN
El sensor es el ojo de cada sistema LiDAR. Los diseñadores de sistemas pueden elegir entre varias tecnologías de sensores en competencia. Muchos ingenieros de diseño consideran que los sensores APD han demostrado ofrecer la mejor combinación de rendimiento y precio. Los fabricantes de sistemas LiDAR también deben tomar en cuenta una serie de factores al elegir a su proveedor de sensores, incluida la experiencia, las capacidades de personalización y la experiencia en cualificación automotriz. A medida que LiDAR y otras tecnologías de movilidad continúan evolucionando, tomar las decisiones correctas respecto a los sensores marca con toda claridad el camino a seguir.
Autores:
Dr. Marc Schillgalies, TE Connectivity
Paul Sharman, TE Connectivity

