Conexión a distancia
Nuestros sensores magnéticos proporcionan datos precisos y confiables a distancia.
Los sensores que monitorean propiedades como la temperatura, la presión, la tensión o el flujo proporcionan una señal de salida que está directamente relacionada con el parámetro deseado. Los sensores magnéticos, por su parte, difieren de la mayoría de estos sensores, ya que muy a menudo no miden directamente la propiedad física de interés, sino que detectan cambios o perturbaciones en los campos magnéticos creados o modificados por objetos o acontecimientos. Por lo tanto, los campos magnéticos podrían transmitir información sobre propiedades como la dirección, la presencia, la rotación, el ángulo o las corrientes eléctricas que el sensor magnético convierte en voltaje eléctrico. Solo unos pocos sensores miden los campos magnéticos en términos absolutos, como el campo terrestre que se utiliza en una brújula para determinar la dirección.
La señal de salida requiere cierto procesamiento de la señal para convertirla al parámetro deseado. La distribución de un campo magnético depende de la distancia y de la forma del objeto o evento que lo crea o perturba (es decir., imán, corriente, etc.). Por lo tanto, es importante tener siempre en cuenta tanto el sensor como el objeto en el diseño de la aplicación. Aunque los sensores magnéticos son un poco más difíciles de utilizar, proporcionan datos precisos y confiables, sin contacto físico.
EFECTO MAGNETORRESISTIVO
El origen físico del efecto de magnetorresistencia en los metales de transición radica en la dependencia de la dirección de la magnetización de la dispersión de electrones. En los metales de transición, los portadores predominantes de corriente son los electrones 4s, ya que tienen una mayor movilidad que los electrones 3d. La dispersión de electrones de las bandas s a d es mayor cuando los electrones viajan paralelos a la magnetización.
Puentes de Wheatstone
En la mayoría de las aplicaciones, el elemento académico de Hunt no es adecuado, ya que no proporciona una referencia cero. Esta desventaja, así como la dependencia de la temperatura de la resistencia, se puede evitar con un puente de Wheatstone.
Unidades magnéticas
El lector común, que no es especialista en magnetismo, se enfrenta a una situación bastante confusa con respecto a las unidades magnéticas. La siguiente tabla ayudará a encontrar rápidamente los factores de conversión entre las diferentes unidades utilizadas:
| Unidad 1 | Multiplicar por | = Unidad 2 | Comentario |
|---|---|---|---|
| Tesla | 104 | Gauss | |
| Oerstedt |
1 | Gauss | μr = 1 ! |
| Oerstedt | 79.58 | A/m | 103/(4xπ) |
| Weber | 108 | Maxwell |
Tabla 1: Tabla 1: Factores de conversión para unidades magnéticas. Para información detallada, consulta la página de inicio del NIST.
SENSORES MAGNETORRESISTIVOS
Tipos de sensores por campo magnético
En esencia, los sensores magnetorresistivos pueden dividirse básicamente en dos grupos. En aplicaciones de alto campo, como cuando la intensidad del campo aplicado es lo suficientemente fuerte como para saturar el material del sensor magnético blando (aproximadamente para H>10 kA/m), el vector de magnetización en el sensor es siempre (casi) paralelo al campo aplicado. Una aplicación común para un sensor MR de alto campo es un sensor angular sin contacto, como el KMT32B, el KMT36H o los sensores de posición MLS. En aplicaciones de bajo campo, el vector de magnetización está determinado principalmente por la forma de las tiras, ya que la magnetización muestra una preferencia natural por la dirección longitudinal. El campo externo provoca una torsión α de la magnetización en la tira, lo que cambia la resistencia debido al efecto MR. Los sensores lineales de bajo campo como el dado MR174B, los sensores KMY y los sensores de conmutación como el MS32 suelen operar en este modo.
Sensores MR
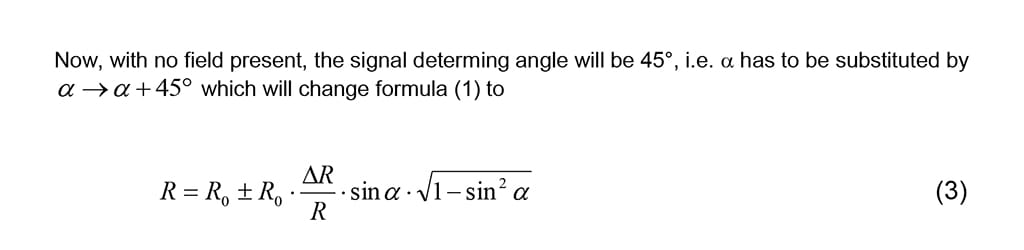
Con curva de transferencia lineal
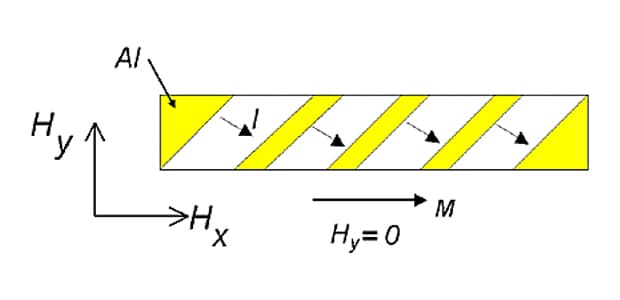
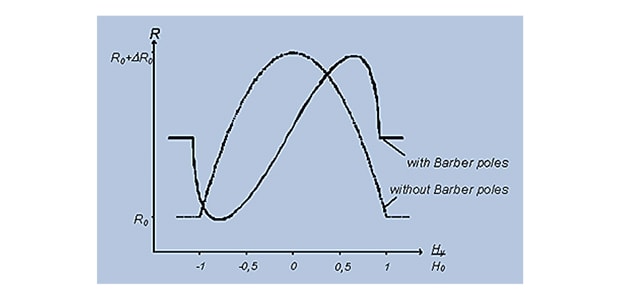
La aplicación de campos magnéticos bajos a un elemento de Hunt conducirá solo a pequeños cambios en la magnetización y, a su vez, el término cos en la fórmula (1) casi no se modificará con pequeños cambios de α. Un elemento de Hunt no es sensible a pequeñas intensidades de campo. Para que el sensor MR sea sensible a campos magnéticos bajos, se debe modificar la curva de transferencia MR (1). La forma más común se logra con barras en diagonal (ver figura 2).
Sobre el Permalloy se colocan barras pequeñas y de alta conductividad, las barras en diagonal, que desviarán la corriente en el Permalloy y cambiarán la trayectoria de la corriente debido a su composición, pero no cambiarán el comportamiento magnético. La corriente entre los huecos de las barras en diagonal tomará el camino más corto, como el perpendicular a las barras.
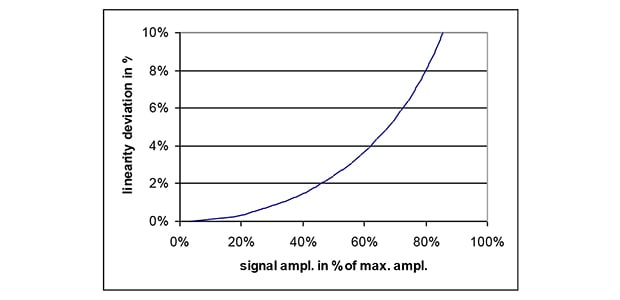
Linealidad del sensor
La linealidad de la señal de salida del sensor depende de la relación entre la amplitud real de la señal y la amplitud máxima delvoltaje de salida. La figura 4 muestra la desviación de la linealidad en relación con este cociente (en porcentaje):
Estabilidad del sensor
La energía magnetostática es la misma para un dominio magnético, ya sea, por ejemplo, paralelo o antiparalelo al campo externo. En otras palabras, los dominios magnéticos pueden fluctuar entre dos direcciones en un entorno estable. Esto no es un problema en el caso de los sensores de alto campo, ya que la curva de transferencia es cuadrática en α, pero tiene efectos drásticos en el caso de un sensor de barras en diagonal, ya que ahora la señal de salida también cambia de signo.
Por esta razón, los sensores magnetorresistivos de campo bajo, como el sensor barberpole, requieren estabilización mediante un campo externo adicional (Hx), orientado favorablemente a lo largo de la franja MR (dirección x). La única función de este campo es definir una dirección preferente para la alineación de los dominios magnéticos. El campo de polarización debe ser lo suficientemente fuerte como para impedir que los campos perturbadores cambien de dominio. Se ha comprobado de manera empírica, que las intensidades de campo de polarización superiores a aproximadamente 2.5 kA/m garantizan el correcto funcionamiento del sensor.
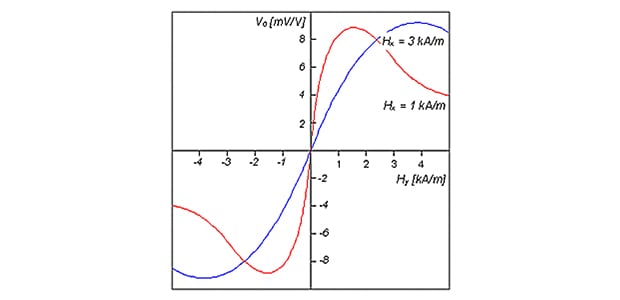
Campos de polarización más pequeños
Hay que tener en cuenta que un campo de polarización cambiará la sensibilidad del sensor. Esto se muestra en la figura 6 y en la tabla 2.
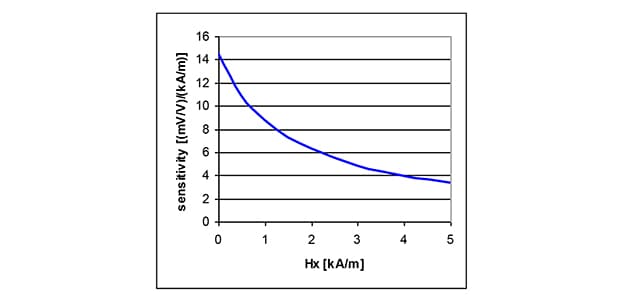
En algunas aplicaciones se requiere alta sensibilidad; de ser así, se podría trabajar sin un campo de polarización. Para ello, el sensor debe estar preacondicionado de manera adecuada: inmediatamente antes de la medición, la magnetización se invierte mediante un breve impulso magnético en una dirección x definida (premagnetización). Para evitar que la magnetización se invierta entre la premagnetización y la medición, los campos externos deben limitarse a aproximadamente menos de 0.5 kA/m.
| Campo de polarización Hx en kA/m |
Rango del campo de funcionamiento en kA/m |
Sensibilidad S en mV/V/kA/m | Campo máximo Hy, máximo en kA/M |
Comentario |
| 0 | 0.35 | 14 | 0.5 | Es necesaria la premagnetización |
| 1 | 0.5 | 10.5 | 0.5 | Es necesaria la premagnetización |
| 2 | 1.1 | 6.3 | 1 | Se recomienda la premagnetización |
| 3 | 1.4 | 4.9 | ∞ | Estable |
| 5 | 2 | 3.4 | ∞ | Estable |
Tabla 2: Sensibilidad y área de funcionamiento recomendada.
Imanes permanentes y sensores de barras en diagonal
El campo Hx estabilizador suele ser generado por un imán permanente. Con KMY20S o KMZ20S, el cliente debe aplicar un imán permanente para generar el campo de polarización requerido. KMY20M y KMZ20M cuentan con un imán interno de ferrita dura. La intensidad máxima del campo externo solo está limitada por la estabilidad del material del imán permanente. En el caso de los tipos KMY20M y KMZ20M, los campos perturbadores superiores a aproximadamente 40 kA/m (500 Gauss) pueden cambiar la dirección de magnetización del imán permanente de forma irreversible. Esto puede provocar un cambio permanente en el voltaje de compensación destruir la función del sensor. Esta limitación puede superarse mediante el uso de sensores de tipo S en combinación con otros imanes, comolos imanes de tierras raras, que deben ser proporcionados por el usuario.
Temperatura
Tanto la resistencia óhmica como la magnetorresistencia se originan en los procesos de dispersión de los electrones conductores. Como todos los procesos de dispersión dependen de la temperatura, la resistencia del puente y el efecto MR ∆R/R también lo son. Los coeficientes de temperatura suelen estar relacionados con dos temperaturas vía:
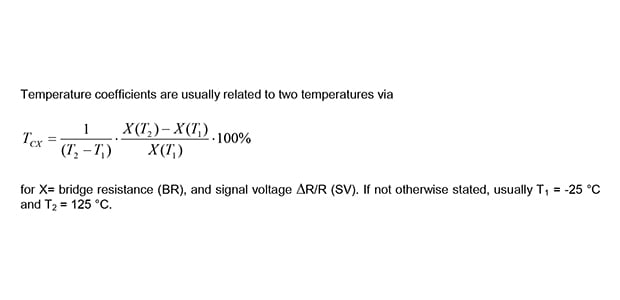
Con respecto a Permalloy, tanto el coeficiente de temperatura resistente al puente como el de amplitud tienen aproximadamente el mismo valor, pero difieren en el signo TCBR≈-TCSV.
De esta manera, el usuario compensa la dependencia que la temperatura tiene de la sensibilidad al usar un suministro de corriente constante. En este caso, el voltaje de alimentación se incrementa al aumentar la temperatura y la resistencia del puente, lo que causa un aumento del voltaje de salida, que compensa la pérdida de sensibilidad.
Otro valor importante es el coeficiente de temperatura de la compensación. Este coeficiente de temperatura se debe a pequeñas diferencias en el comportamiento de la temperatura de las cuatro resistencias de puente. En la práctica, se observa una deriva en el voltaje de salida, que no se puede separar de la señal de salida regular causada por los campos magnéticos. En aplicaciones que utilizan acoplamiento de señal de corriente continua, el coeficiente de temperatura de la compensación limitará la precisión de la medición.
Permalloy es un material muy resistente que cuando está revestido puede tolerar temperaturas muy altas de hasta aproximadamente 300 °C. En este caso, el empaque será el factor limitante.

Andreas Voss presenta detalles sobre la tecnología de sensores magnetorresistivos y dónde se puede aplicar la tecnología de sensor.